Yaskawa iQpump Controller Programming Manual User Manual
Page 284
284
YASKAWA TM.iQp.07 iQpump Controller Programming Manual
Pump Advanced
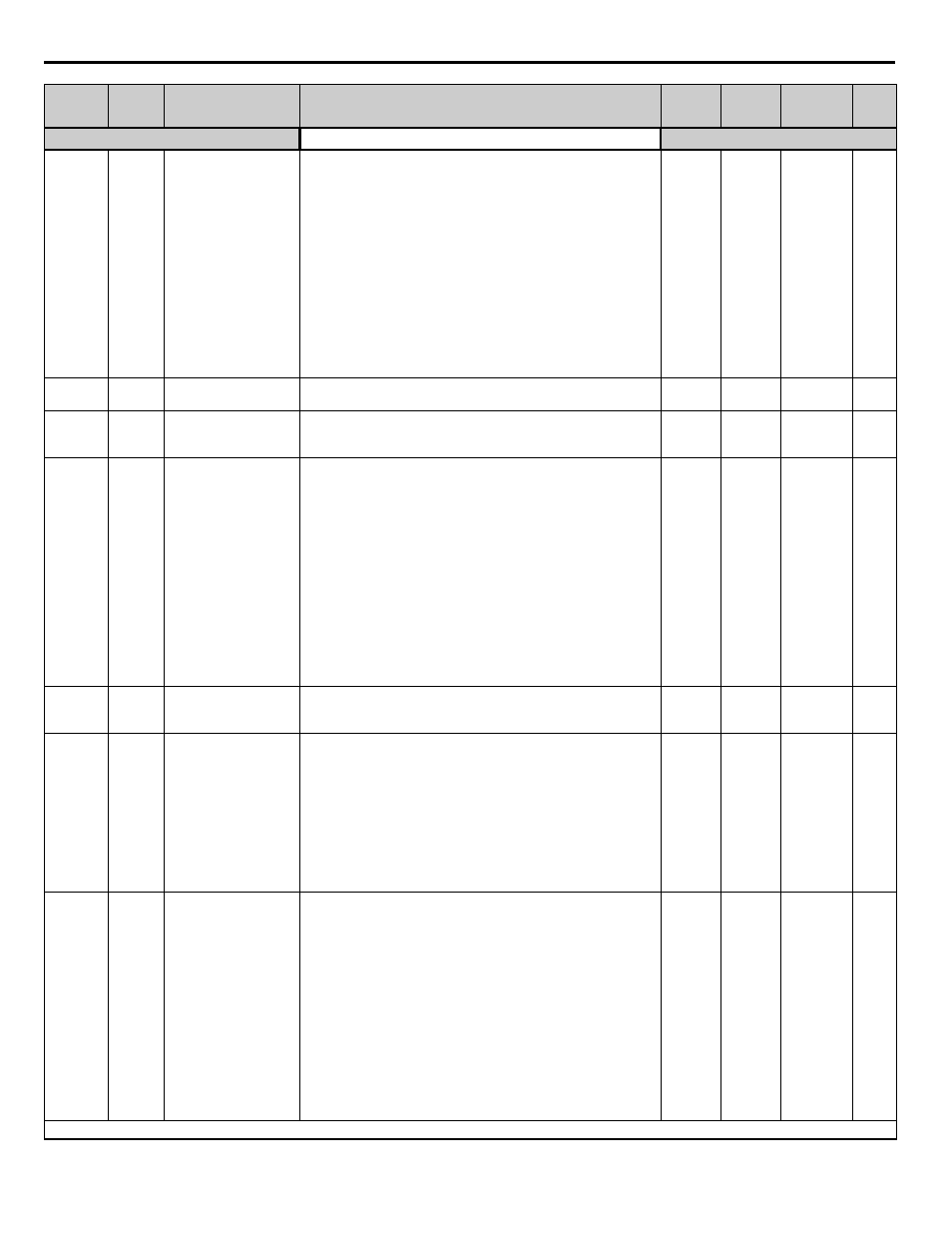
P4-01
0115
Pre-charge Level
Pre-charge Level
Sets the level when the drive will run at the pre-charge frequency
(P4-02). The drive will stop when one of the following conditions
occurs: Feedback signal rises above P4-01 level, pre-charge timer
P4-03 expires, or low water digital input is deactivated (H1-XX = 85).
The pre-charge function can only be activated while in a stop
condition. The function is enabled by setting P4-03 to a value greater
than 0. When the function is activated, the drive’s operator display
indicates a “Pre-charge” alarm.
Note:
This function is only active in the stopped mode.
If P1-01 = 3, the function is active when there is only one drive running
on the network.
<0034>
Thrust Mode:
The pre-charge level is used when the thrust mode is
active for the feedback check. The thrust mode is deactivated when the
feedback exceeds the programmed level in P4-01. A value of 0 disables
the thrust mode feedback check function.
0.0 ~
6000.0
(system
units
P1-02)
0.0
(system
units
P1-02)
Programming
P4-02
0116
Pre-charge Frequency
Pre-charge Freq
Sets the frequency reference used when the pre-charge function is
active.
0.00 ~
120.00 Hz
0.00 Hz Programming
P4-03
0117
Pre-charge Time
Pre-charge Time
Sets the maximum allowed pre-charge time.
A value of 0 disables this function. If P1-01 = 3, the function is active
when there is only one drive running on the network.
<0034>
0.0 ~
3600.0 min
0.0 min Programming
P4-04
0118
Thrust Bearing
Acceleration Time
Thrust Acce Time
Sets the thrust bearing acceleration time. When enabled (P4-05 > 0),
the drive output frequency will ramp up to the specified thrust bearing
frequency reference in P4-05 using an acceleration time as specified in
P4-04. The PI mode is automatically disabled.
Once the output frequency reaches the programmed thrust bearing
frequency, the drive automatically switches to PI control and the
original acceleration time (C1-01), and will continue in the normal
operation (auto) mode, unless Pre-charge is enabled, in which case Pre-
charge mode occurs.
This function active in the Hand Mode and Auto Mode.
Note:
In Auto Mode, the Minimum Pump Frequency will become the
thrust bearing frequency if smaller than the thrust bearing frequency in
P4-05.
In Hand Mode, the minimum frequency is P4-05 when the thrust
mode is enabled. The Pre-charge level is not active in the hand mode.
0.0 ~
600.0 s
1.0 s
Programming
P4-05
0119
Thrust Bearing
Frequency
Thrust Freq
Sets the frequency reference used when the thrust bearing function is
active. A value of 0 disables this function.
0.0 ~
120.0 Hz
30.0 Hz Programming
P4-06
<0032>
011A
Thrust Bearing
Deceleration Time
Thrust Dec Time
This deceleration time will be used to bring the drive from Thrust
Frequency (P4-05) to stop when Thrust Mode is active. Any time the
Run Command is removed while the drive is operating in the Thrust
Mode above the Thrust Frequency, this deceleration time will be used
once the frequency reference is at or below the Thrust Frequency.
Note:
In Auto Mode, the Minimum Pump Frequency (P1-06) will
become the thrust bearing frequency if smaller than the thrust bearing
frequency in P4-05.
In Hand Mode, the minimum frequency is P4-05 when the thrust
mode is enabled. The Pre-charge level is not active in the hand mode.
0.0 ~
600.0 s
1.0 s
Programming
P4-07
<0032>
011B
Feedback Fault Auto
Restart Enable
Fdback Flt Rstrt
Setting to enable / disable Auto Restart for the following iQpump
transducer / feedback faults (N = disable / Y = enable):
LL: Low Level Feedback (P1-07)
HL: High Level Feedback (P1-09)
TL: Transducer Loss (b5-12)
0: TL = N HL = N LL = N
1: TL = N HL = N LL = Y
2: TL = N HL = Y LL = N
3: TL = N HL = Y LL = Y
4: TL = Y HL = N LL = N
5: TL = Y HL = N LL = Y
6: TL = Y HL = Y LL = N
7: TL = Y HL = Y LL = Y
Note:
Parameter L5-01 needs to be set to “1” and program L5-03 needs
to be set to the applicable time.
0 ~ 7
0
Programming
Denotes that parameter can be changed when the drive is running.
Parameter
No.
Addr.
Hex
Parameter Name
Digital Operator
Display
Description
Setting
Range
Factory
Setting
Menu
Location
Page
No.