L6 torque detection, L6-01 torque detection selection 1, L6-02 torque detection level 1 – Yaskawa iQpump Controller Programming Manual User Manual
Page 125: L6-03 torque detection time 1
YASKAWA TM.iQp.07 iQpump Controller Programming Manual
125
L6 Torque Detection
◆
L6-01 Torque Detection Selection 1
◆
L6-02 Torque Detection Level 1
Setting Range:
0 ~ 300% of the iQpump drive rated output current
Factory Default: 15% of the iQpump drive rated output current
Refer to parameter L6-02 in Appendix A for description details.
◆
L6-03 Torque Detection Time 1
Setting Range:
0.0 ~ 10.0 s
Factory Default: 10.0 s
The iQpump drive can be programmed to indicate when either an overtorque or an undertorque conditions exist. A digital output must be
programmed for “Torque Detection,” (H2-01 / H2-02 = “B: Trq Det 1 N.O.” or “17: Trq Det 1 N.C.). A warning of an overtorque
condition can indicate a jam and an undertorque condition can indicate a broken belt, no water in a pump, or other loss of load.
To configure Torque Detection requires the following decisions:
1. Is an overtorque condition or an undertorque condition being checked?
2. Is the torque condition present when the drive is running or only at speed agree? Nuisance detection during acceleration, when variable
torques are normally required, can be avoided.
3. Is the drive to fault if the torque condition is detected or only alarm and continue operation?
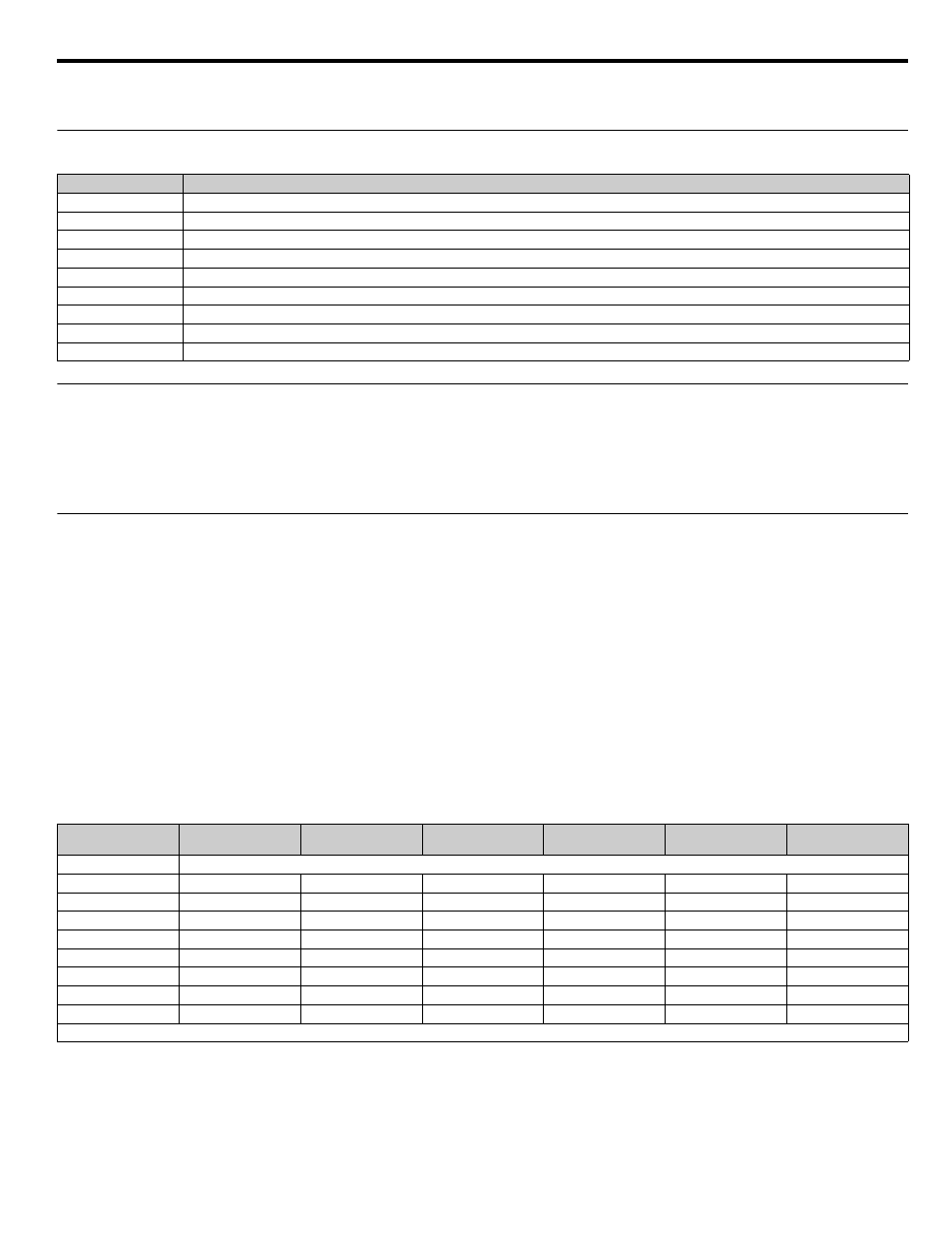
The following table can help choose the proper setting for Torque Detection Selection 1 to get the wanted results.
Table 44 L6-01 Setting Choices
After selecting the proper detection scheme the Torque Detection Level (L6-02) must be specified. If the current level read by the output
current transformers rises above (overtorque) or drops below (undertorque) this level, and remains there for at least the Torque Detection
Time (L6-03), then the Torque Detection Function will change the state of any digital output configured for Torque Detection (H2-01 /
H2-02 = “B: Trq Det 1 N.O.,” or “17: Trq Det 1 N.C.”).
Setting
Description
0
Disabled (
factory default
)
1
OL@SpdAgree - Alm
2
OL At Run -Alm
3
OL@SpdAgree - Flt
4
OL At Run - Flt
5
UL@SpdAgree - Alm
6
UL at Run - Alm
7
UL@SpdAgree - Flt
8
UL At Run - Flt
L6-01
Setting
Overtorque
Undertorque
Fault
Alarm
Always Detected
Only Detected @
Spd Agree
0
Torque Detection Disabled
1
X
X
X
2
X
X
X
3
X
X
X
4
X
X
X
5*
X
X
X
6
X
X
X
7
X
X
8
X
X
*Suggested settings for Loss of Load indication