Yaskawa iQpump Controller Programming Manual User Manual
Page 194
194
YASKAWA
TM.iQp.07 iQpump Controller Programming Manual
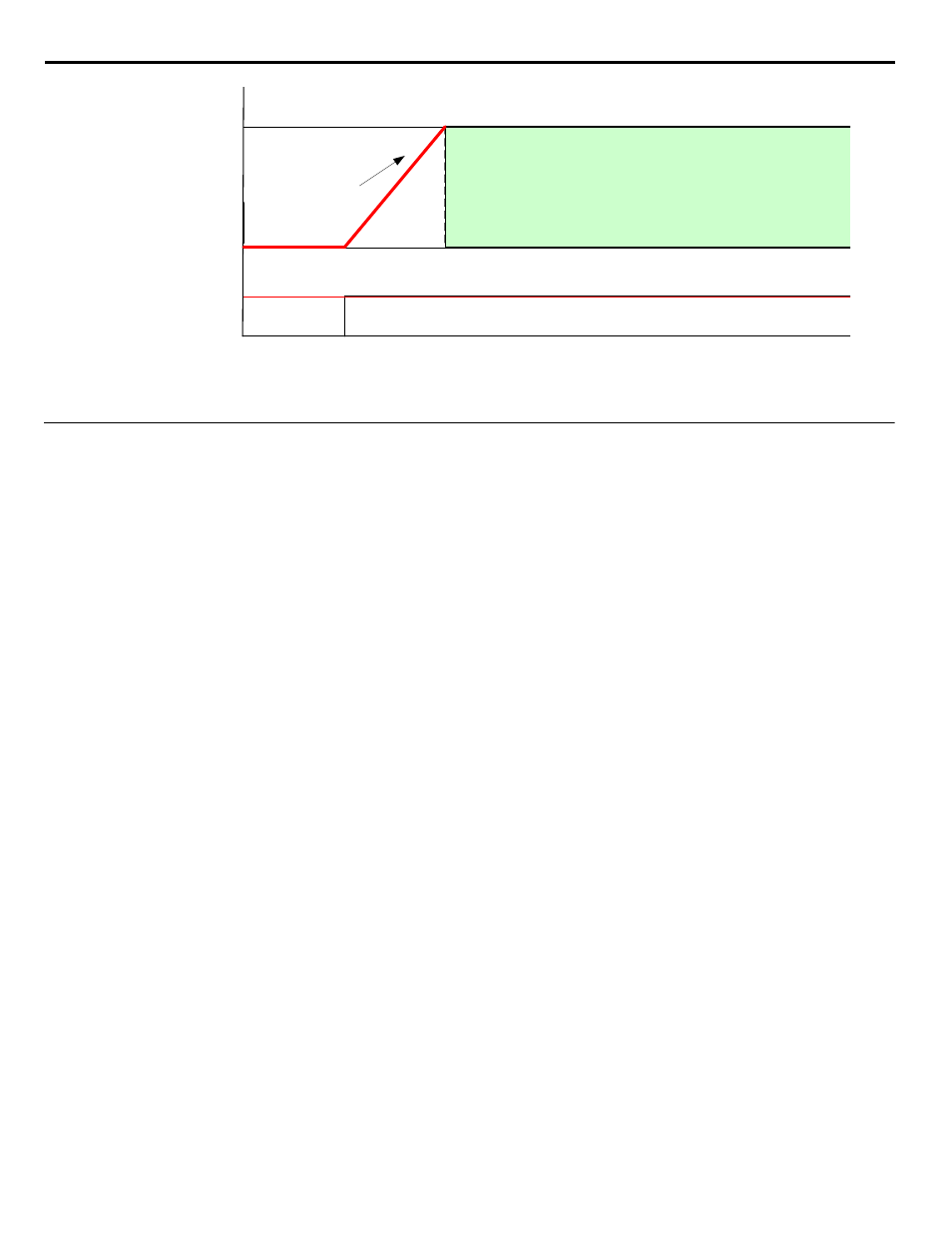
Figure 1.145
Figure 149.
◆
P4-05 Thrust Bearing Frequency
Setting Range:
0.0 ~ 120.0 Hz
Factory Default: 30.0 Hz
The iQpump drive can be configured for special functions for dedicated pumping applications. These functions are: Pre-charge Level
(P4-01) and Thrust Bearing Frequency (P4-05).
Refer to the Pre-charge Level (P4-01) for further description about the pre-charge function.
The thrust bearing function will be activated when the frequency value is greater than 0 for the Thrust Bearing Frequency (P4-05)
parameter and the pre-charge function is de-activated. The pre-charge function will de-activate the thrust bearing function.
The thrust bearing frequency of the iQpump drive will operate as determined by programming the Thrust Bearing Frequency (P4-05).
The drive’s output will ramp up or accelerate up to the thrust bearing frequency based on the acceleration time programmed in the Thrust
Bearing Acceleration Time (P4-04).
The PI mode is automatically disabled during the thrust bearing operation. Once the output frequency reaches the thrust bearing
frequency programmed in the Thrust Bearing Frequency (P4-05), the drive will automatically switch to the Auto Mode or automatic
regulation. The thrust bearing function is available in Hand and Auto Modes.
The Thrust Bearing and Pre-charge functions will work in tandem, if both are enabled.
Setting Thrust Bearing Frequency (P4-05) to a value of 0 will disable this function.
The Thrust Bearing Frequency (P4-05) works in conjunction with the Thrust Bearing Acceleration Time (P4-04).
When the thrust bearing function is activated, a “Thrust Bearing” alarm will be displayed on the digital operator.
■
Function Description:
<0034>
Frequency Reference Limiting. Lower-Limit all fixed frequency references to either Minimum Pump Frequency (P1-06) or Thrust
Frequency (P4-05), whichever is greater.
If a “fixed” frequency is set below either P1-06 or P4-05, an alarm will display after a 2 second delay. The “fixed” frequencies consists of:
P3-02 Maximum Multi Level, P5-02 Hand Reference, P9-06 Lag Fixed Speed - Speed, Analog Hand Reference, Analog Frequency
Reference (PID disabled), and the Digital Preset Frequencies (PID disabled). The alarms will only display if the drive is running at or
above the thrust frequency (if enabled).
Note:
• In Auto Mode, the Minimum Pump Frequency (P1-06) will become the thrust bearing frequency if the minimum pump
frequency is less than the Thrust Bearing Frequency (P4-05).
• In Hand Mode, the minimum frequency will be the Thrust Bearing Frequency (P4-05).
• The thrust bearing function is required when using Electric Submersible Motors. See “CAUTION” statement that follows.
TIME
0 Hz
Thrust Freq.
P4-05
Stop
Auto Mode Run Command
Auto Mode Run
PI Enabled, Continue Normal Auto Operation
Acceleration
Time P4-04
PI Disabled