Yaskawa iQpump Controller Programming Manual User Manual
Page 262
262
YASKAWA TM.iQp.07 iQpump Controller Programming Manual
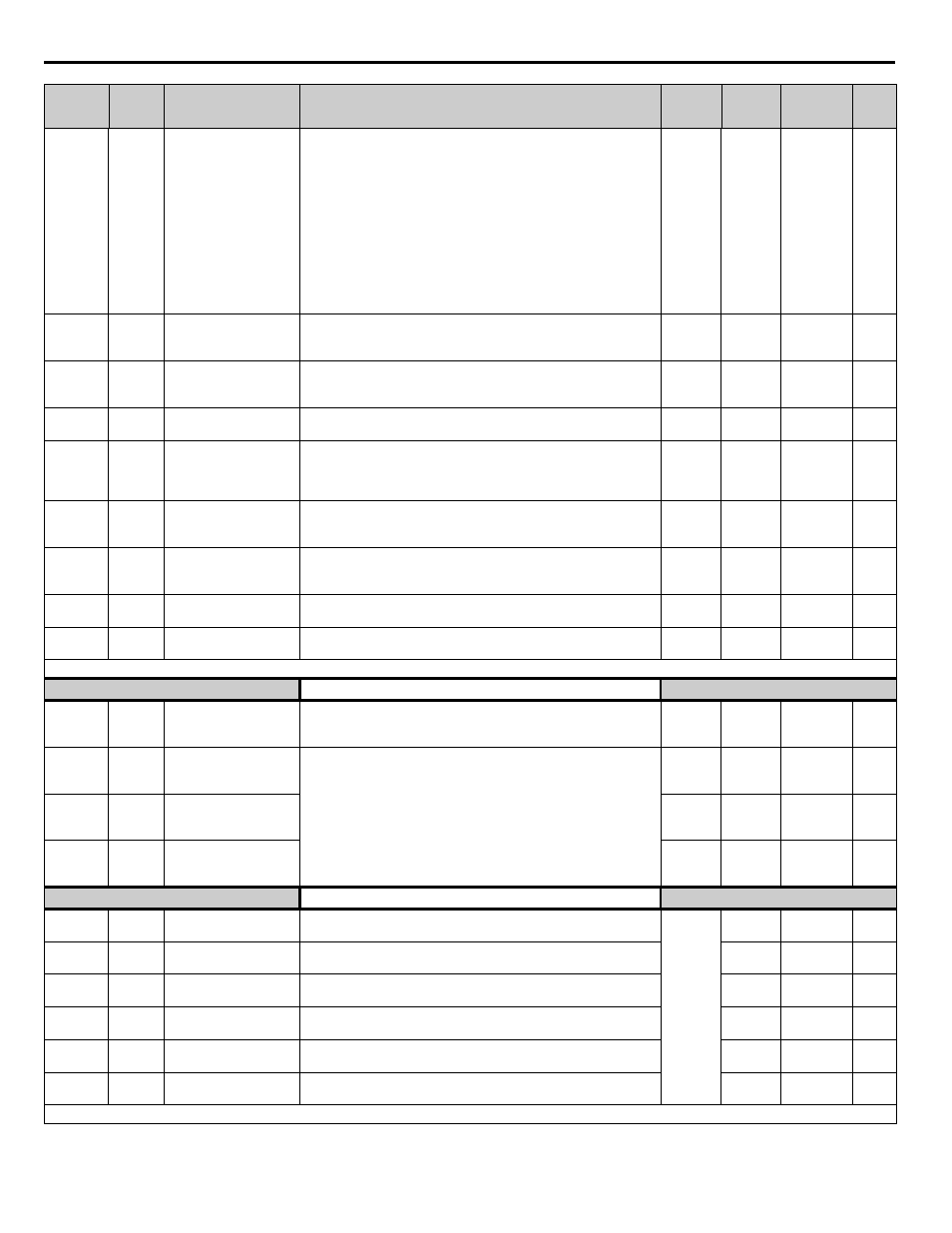
b5-07
01AB
PI Offset Adjustment
PI Offset
Sets the amount of offset of the output of the PI controller. Set as a %
of fmax.
The PI Offset Adjustment parameter has two different uses. Parameter
b5-07 serves different functions depending on whether it is used on a
standard PI loop or a Differential PI loop.
1: Parameter b5-07 causes an offset to be applied to the output of the PI
function in a non-Differential PI loop. Every time the PI output is
updated, the offset is summed with the PI output. This can be used to
artificially kick-start a slow starting PI loop.
2: If the drive is configured for Differential PI Regulation
(H3-09 = 16), then the PI Offset is the targeted maintained differential
between the signal measured on analog input A1 and the signal
measured on analog input A2.
–100.0 ~
+100.0 %
0.0 % Programming
b5-08
01AC
PI Primary Delay Time
Constant
PI Delay Tim
e
Sets the amount of time for a filter on the output of the PI controller.
0.00 ~
10.00 s
0.00 s
Programming
b5-09
01AD
PI Output Level
Selection
Output Level Sel
Determines whether the PI controller will be direct or reverse acting.
0: Normal Output (direct acting)
1: Reverse Output (reverse acting)
0 ~ 1
0
Programming
b5-10
01AE
PI Output Gain Setting
Output Gain
Sets the output gain of the PI controller.
0.0 ~ 25.0
1.0
Programming
b5-12
01B0
PI Feedback Reference
Missing Detection
Selection
Fb los Det Sel
0: Disabled
1: Alarm
2: Fault
0 ~ 2
2
Programming
—
b5-13
01B1
PI Feedback Loss
Detection Level
Fb los Det Lvl
Sets the PI feedback loss detection level as a percentage of maximum
frequency (E1-04).
0 ~ 100 %
0 %
Programming
b5-14
01B2
PI Feedback Loss
Detection Time
Fb los Det Time
Sets the PI feedback loss detection delay time in terms of seconds.
0.0 ~
25.5 s
2.0 s
Programming
b5-17
01B5
PI Accel / Decel Time
Acc/Dec Time
Applies an accel / decel time to the PI setpoint reference.
0.0 ~
25.5 s
0.0 s
Programming
b5-32
85F
Integrator Ramp Limit
Int Ramp Lim
When set a value greater than zero, the PI Integrator is forced to be
within + / - this amount of the soft starter output
0.0 ~
10.0 Hz
0.0 Hz
Programming
Denotes that parameter can be changed when the drive is running.
Energy Saving
b8-01
01CC
Energy Saving Control
Selection
Energy Save Sel
Energy Savings function enable / disable selection
0: Disabled
1: Enabled
0 ~ 1
0
Programming
b8-04
01CF
Energy Saving
Coefficient Value
Energy Save COEF
Used to fine-tune the energy savings function.
0.0 ~ 655.0
kVA
Dependent
Programming
b8-05
01D0
Power Detection Filter
Time
kW Filter Time
0 ~
2000 ms
20 ms
Programming
b8-06
01D1
Search Operation Voltage
Limit
Search V Limit
0 ~ 100 %
0 %
Programming
Accel/Decel
C1-01
0200
Acceleration Time 1
Accel Time 1
Sets the time to accelerate from zero to maximum frequency.
0.0 ~
6000.0 s
20.0 s
Programming
C1-02
0201
Deceleration Time 1
Decel Time 1
Sets the time to decelerate from maximum frequency to zero.
10.0 s
Programming
C1-03
0202
Acceleration Time 2
Accel Time 2
Sets the time to accelerate from zero to maximum frequency when
selected via a multi-function input.
10.0 s
Programming
C1-04
0203
Deceleration Time 2
Decel Time 2
Sets the time to decelerate from maximum frequency to zero when
selected via a multi-function input.
10.0 s
Programming
C1-05
0204
Acceleration Time 3
Accel Time 3
Sets the time to accelerate from zero to maximum frequency when
activated by P3-12. Used for system response stabilization.
50.0 s
Programming
C1-06
0205
Deceleration Time 3
Decel Time 3
Sets the time to decelerate from maximum frequency to zero when
activated by P3-12. Used for system response stabilization.
50.0 s
Programming
Denotes that parameter can be changed when the drive is running.
Parameter
No.
Addr.
Hex
Parameter Name
Digital Operator
Display
Description
Setting
Range
Factory
Setting
Menu
Location
Page
No.