7 attaching the outer arms and platform, Clocking the platform to the base, Figure 3-5 – Adept s650H Quattro User Manual
Page 46: Major robot components, top view
Chapter 3 - Robot Installation
46
Adept Quattro s650 Robot User’s Guide, Rev B
3.7
Attaching the Outer Arms and Platform
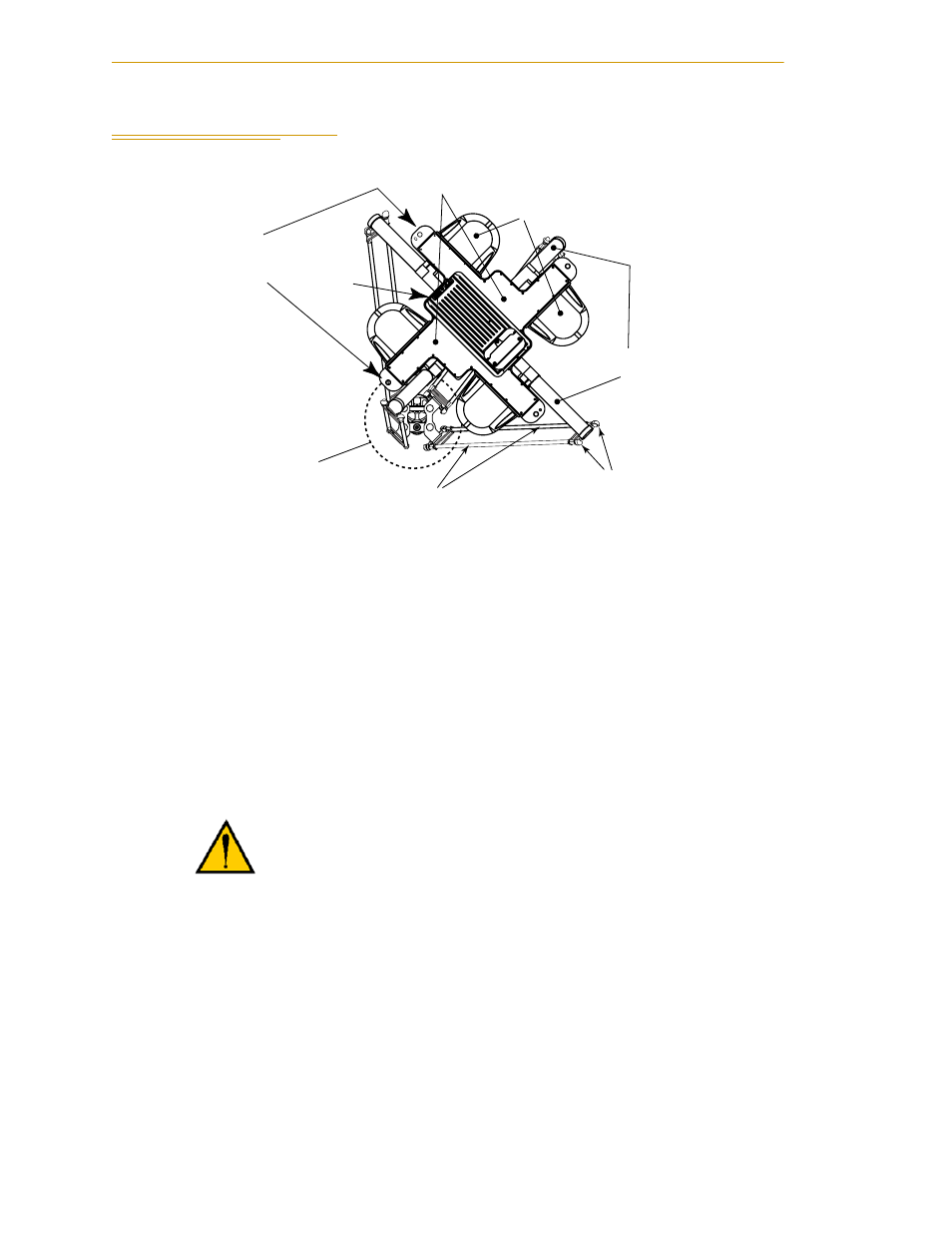
Figure 3-5. Major Robot Components, Top View
The Adept Quattro s650 robot platform is attached to the inner arms by the outer arms.
One pair of outer arms attaches to each inner arm.
NOTE: Except for attaching the outer arms and end-effector tooling, the
platform is shipped fully assembled.
Clocking the Platform to the Base
The rotational alignment (clocking) of the platform to the base is critical to the correct
operation of the Adept Quattro s650 robot.
• Each inner arm end cap is labeled with a joint number (1 - 4). See
.
NOTE: The end caps of inner arms supplied as spares will not be labeled
with a number.
• The ends of the platform cross-pieces (between each pair of ball studs) are labeled
with matching designators (1 - 4).
• In addition, +X and +Y World Coordinates are labeled near the ‘2’ and ‘3’ platform
labels. See
• When installing the platform, the numbers between the platform ball studs match
the numbers on the end caps of the inner arms to which they are attached.
CAUTION:
Incorrect clocking of the platform will result in
incorrect robot performance.
Motor Covers
Mounting
Pads
Inner Arms
Outer Arms
AIB
Ball Joints
Base
Platform