Figure 3-3, Sample quattro mounting frame – Adept s650H Quattro User Manual
Page 39
Mounting Frame
Adept Quattro s650 Robot User’s Guide, Rev B
39
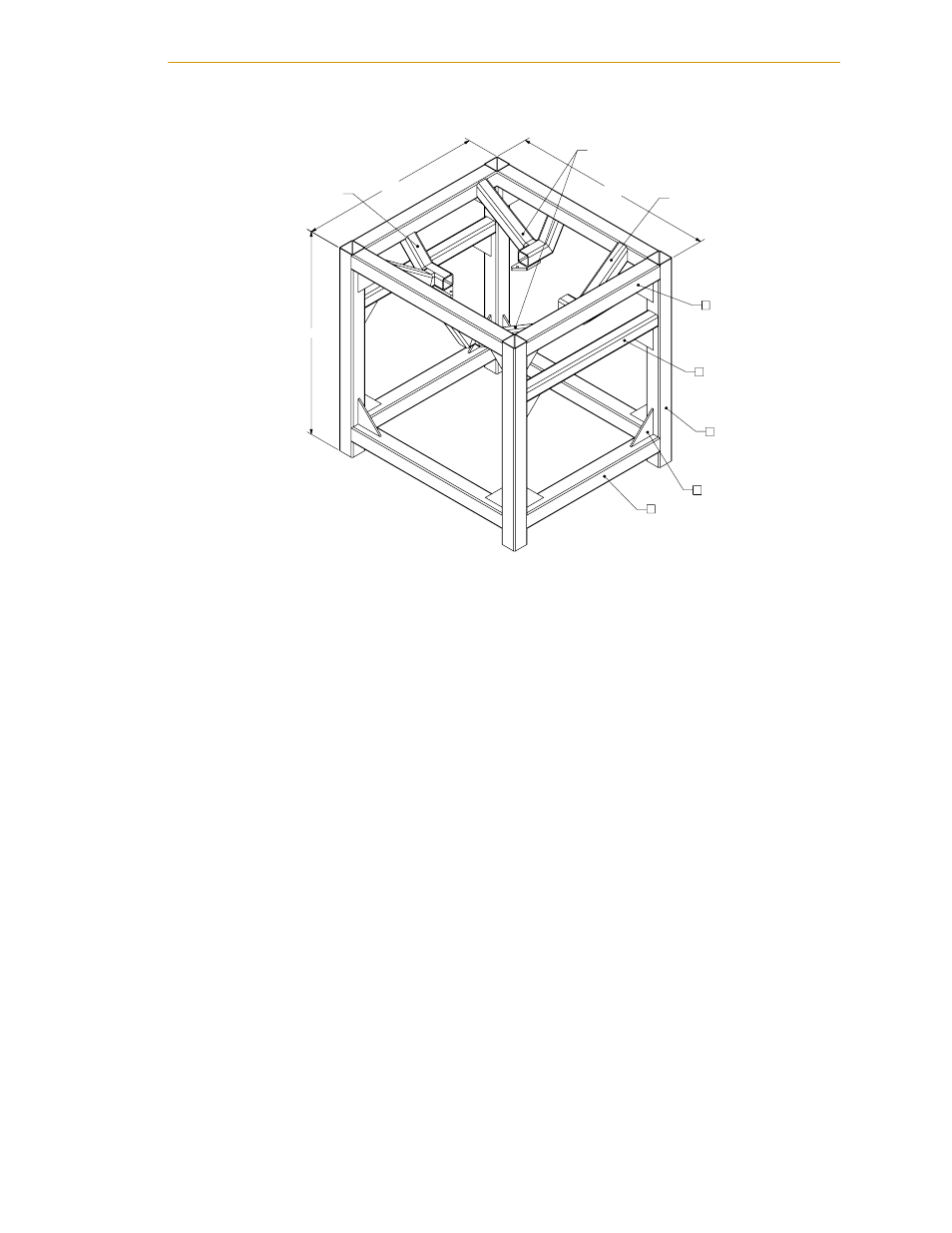
Figure 3-3. Sample Quattro Mounting Frame
NOTE: More specifications for the sample frame are provided in
.
Any robot’s ability to settle to a fixed point in space is governed by the forces, masses, and
accelerations of the robot. Since “every action has an equal and opposite reaction”, these
forces are transmitted to the robot frame and cause the frame and base of the robot to
move and possibly vibrate in space. As the robot system works to position the tool flange
relative to the base of the robot, any frame motion in the base of the robot will be
“unobservable” to the robot system and will be transmitted to the tool flange. This
transmitted base motion will result in inertial movement of the tool flange mass, and will
cause disturbance forces to be introduced into the robot control system. These disturbance
forces cause “work” to be done by the robot servo control system which may result in
longer settling times for robot operations.
It is important to note that, even after the system reports the robot to be fully settled, the
tool flange will still be moving by any amount of motion that the suspended base of the
robot may be experiencing.
* DIMENSIONS ARE IN MILLIMETERS
UNLESS OTHERWISE SPECIFIED:
MATERIAL SIZING:
150mm X 150mm X 6mm SQUARE STRUCTURAL TUBING
A.
120mm X 120mm X 10mm SQUARE STRUCTURAL TUBING
B.
250mm X 250mm X 15mm TRIANGULAR GUSSET
C.
A
4x
A
4x
2x
B
SEE DETAIL 1
20x
A
4x
C
SEE DETAIL 2
SEE DETAIL 1
1800.0
2000.0
2000.0