Mounting to bottom of frame pads, Figure 3-4, Location of slings for lifting robot base – Adept s650H Quattro User Manual
Page 43
Mounting the Robot Base
Adept Quattro s650 Robot User’s Guide, Rev B
43
7. Slowly lower the robot while aligning the M20 holes in the robot mounting pads
with the holes in the frame mounting pads.
8. When the mounting pad surfaces are touching, remove the slings and M20
eyebolts. Retain the eyebolts for future use.
9. Follow the instructions in
“Install Mounting Hardware” on page 44
.
Mounting to Bottom of Frame Pads
Since the eyebolts would be in the way of this mounting method, you will have to use
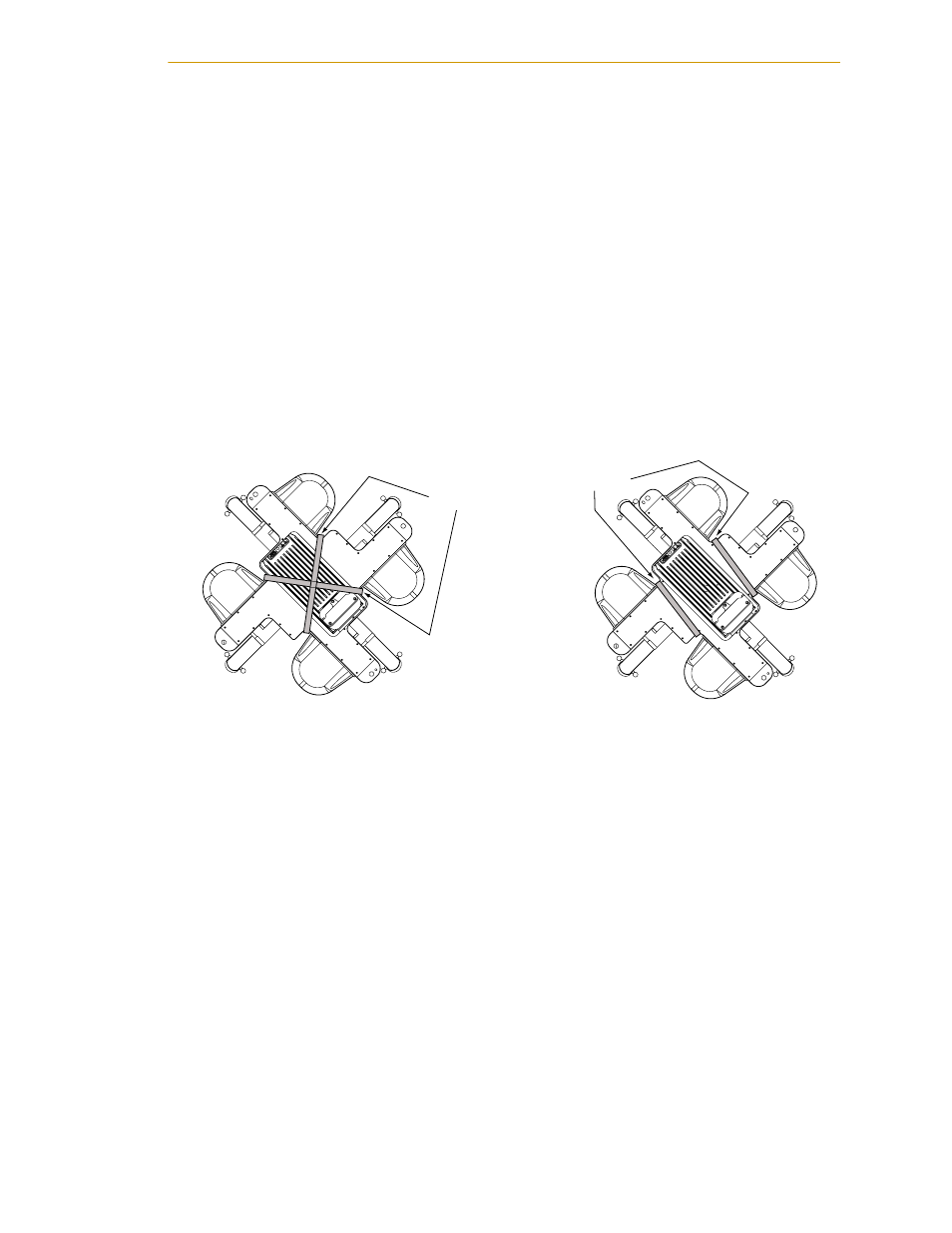
slings or other means to lift the robot base. Nylon slings can be wrapped across the center
of the robot base, away from the inner arms. See
1. Remove all lag bolts from the mounting pads before lifting the robot base.
2. Wrap slings around the robot base. See
for two methods.
NOTE: Make sure the slings do not touch the status panel or inner arms.
Figure 3-4. Location of Slings for Lifting Robot Base
3. Lift the robot and position it directly over the mounting frame.
4. Slowly lower the robot while rotating it slightly, so the four mounting pads are
lowered past the frame mounting pads without touching.
5. When the robot base mounting pads are below the lower surface of the frame
mounting pads, rotate the robot base so the M20 threaded holes in the robot base
mounting pads align with the holes in the frame mounting pads.
6. Lift the robot base up, keeping the holes in the robot base pads and the frame
pads aligned, until the top surfaces of the robot base pads are touching the bottom
surface of the frame mounting pads.
7. Follow the instructions in
“Install Mounting Hardware” on page 44
.
Slings
Slings