Adept smartcontroller cx, 2 installation overview, Figure 1-10. adept smartcontroller cx – Adept s650H Quattro User Manual
Page 20
Chapter 1 - Introduction
20
Adept Quattro s650 Robot User’s Guide, Rev B
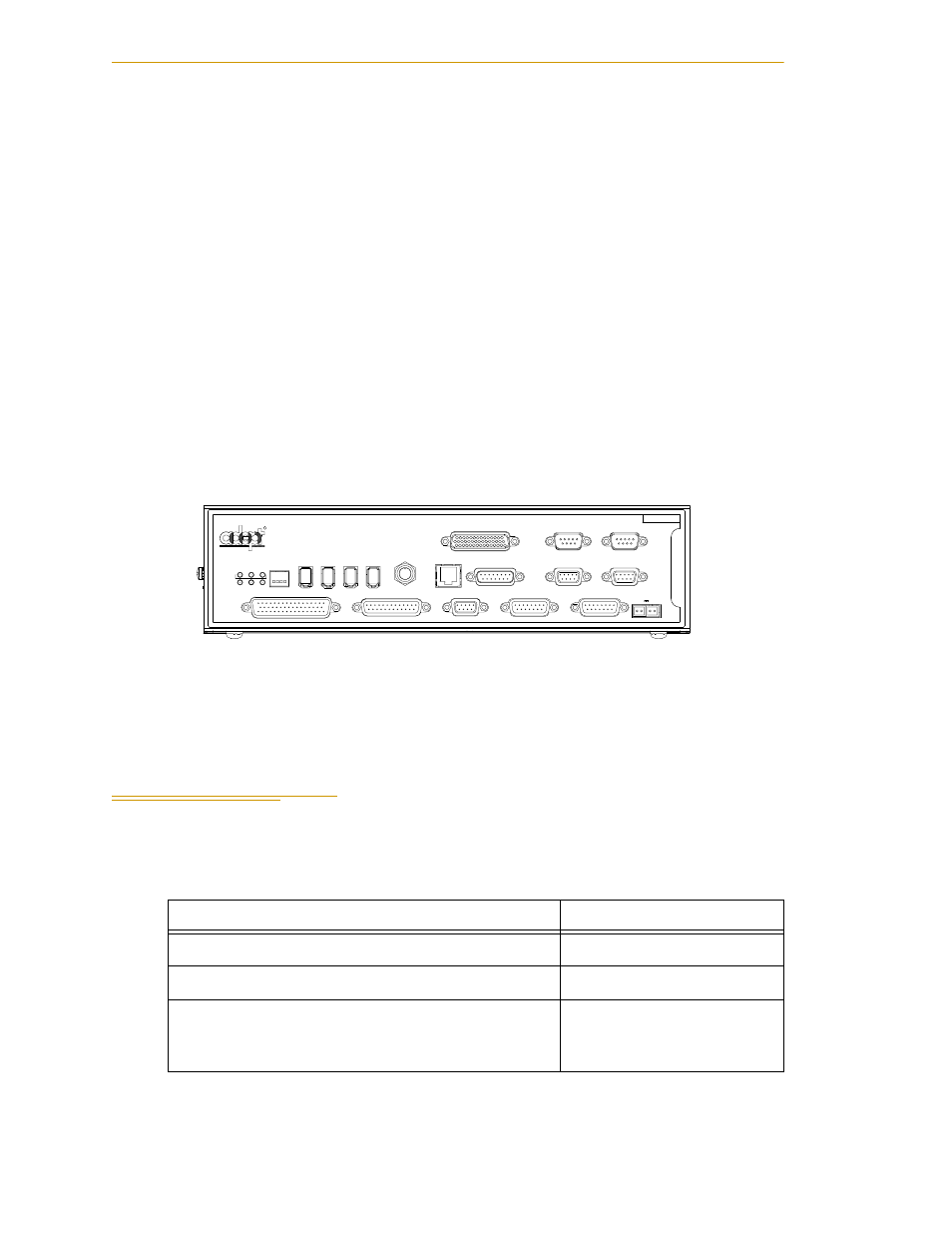
Adept SmartController CX
The SmartController is the foundation of Adept’s family of high-performance distributed
motion and vision controllers. The SmartController is designed for use with:
• Adept Quattro robots
• Adept Cobra s-series robots
• Adept Viper s-series robots
• Adept Python linear modules
• Adept MotionBlox-10
• Adept sMI6 (SmartMotion)
The Adept SmartController CX supports an integrated vision option and a conveyor
tracking option, as well as other options. It offers scalability and support for IEEE
1394-based digital I/O and general motion expansion modules. The IEEE 1394 interface is
the backbone of the Adept SmartServo distributed servo network, which supports Adept
products. The controller is commonly programmed through its Fast Ethernet port, which
can be on a distributed network or directly connected to a PC for programming.
Figure 1-10. Adept SmartController CX
Refer to
Adept SmartController User’s Guide
for detailed SmartController specifications.
1.2
Installation Overview
The system installation process is summarized in the following table. Refer also to the
system cable diagram in
Table 1-1. Installation Overview
Task to be Performed
Reference Location
1. Mount the robot to a level, stable mounting frame.
See
2. Attach the robot outer arms and platform
See
3. Install the SmartController, Front Panel, T1 Manual
Control Pendant (MCP) (if purchased), and
AdeptWindows user interface.
See
R
ON
SmartServo
IEEE-1394
1 2 3 4
SF
ES
HD
SW1
1.1
1.2
2.1
2.2
OK
1
2
3
XDIO
LAN
HPE
OFF
XSYS
CAMERA
Eth 10/100
XUSR
Device Net
XFP
RS-232/TERM
RS-232-1
XMCP
BELT ENCODER
Sm
a
rtController CX
-+
-+
RS-422/485
XDC1 XDC2
24V
5A
*S/N 3562-XXXXX*
RS-232-2