Programming considerations, Syntax – Echelon I/O Model Reference for Smart Transceivers and Neuron Chips User Manual
Page 56
46
Direct I/O Models
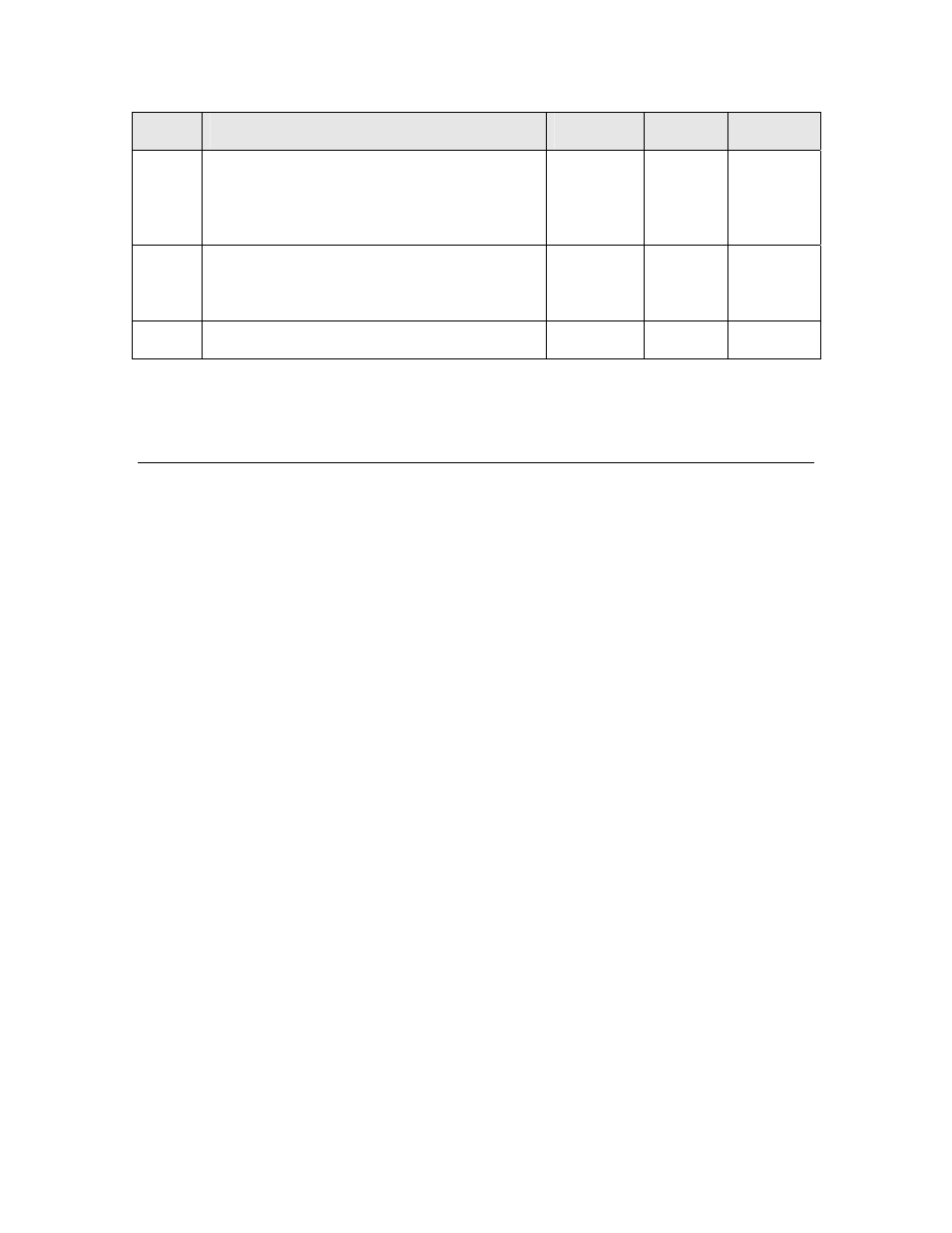
Symbol Description
Minimum
Typical
Maximum
t
wrd
Start pulse edge to Smart Transceiver
releasing the data line
10 MHz
5 MHz
—
66.6 μs
72.0 μs
—
t
ibd
Inter-bit
delay
10 MHz
5 MHz
—
61.2 μs
122.4 μs
—
t
ret
Return from I/O call
—
42.6 μs —
The leveldetect input model can be used for detection of asynchronous
attachments of 1-Wire devices to the Smart Transceiver. In such a case, the
leveldetect input object is overlaid on top of the Touch I/O object. See
on page 17 for information about I/O object overlays.
Programming Considerations
The touch I/O model is used to interface to the 1-Wire protocol, and allows up to
255 bytes of data can be transferred at a time.
Syntax
pin
touch [output_pin(
pin
)] [timing(
t-low
,
t-rdi
,
t-wrd
)]
io-object-name
;
pin
An I/O pin. Touch I/O can specify one of the pins IO_0 through IO_7.
Multiple Touch I/O objects can be declared. If you do not explicitly declare a
separate output pin with the output_pin( ) parameter, this pin specifies both
the input and output pin. Otherwise, it specifies only the input pin.
output_pin(
pin
)
Optionally specifies the output pin. If not specified, the output pin is the
same as the input pin.
timing(…)
Optionally specifies three timing parameters. There are three time periods
associated with each bit time slot. All values here apply to a Series 3100
device with a 10 MHz input clock (and
double
for a 5 MHz input clock).
Because these timing controls affect the low-level single bit function used by
both read and write operations, they are required for both 1-wire read and
write operations. A value of 0 for a timing control is the same as a value of
256.
You can optionally specify the following three timing parameters when you
declare the touch I/O object:
•
t-low
The length of t
LOW
. This is the interval where the Neuron firmware
asserts a low on the 1-Wire bus signaling the start of the bit slot.