Ttl differential encoder output signal, Figure 12 - ttl differential encoder termination – Rockwell Automation CHPS-250 Linear Stage Installation User Manual
Page 44
44
Rockwell Automation Publication CHPS-UM001D-EN-P - July 2014
Chapter 6
Connecting the Stage
TTL Differential Encoder
Output Signal
Use the following information to connect a stage with a TTL Differential Encoder.
The incremental encoder typically have the following quadrature edge
separation.
To calculate the minimum recommended counter frequency for 1
μ
m and
0.5
μ
m encoders, use the following formula.
The minimum recommend counter frequency for the 0.1
μ
m encoder is 12 MHz.
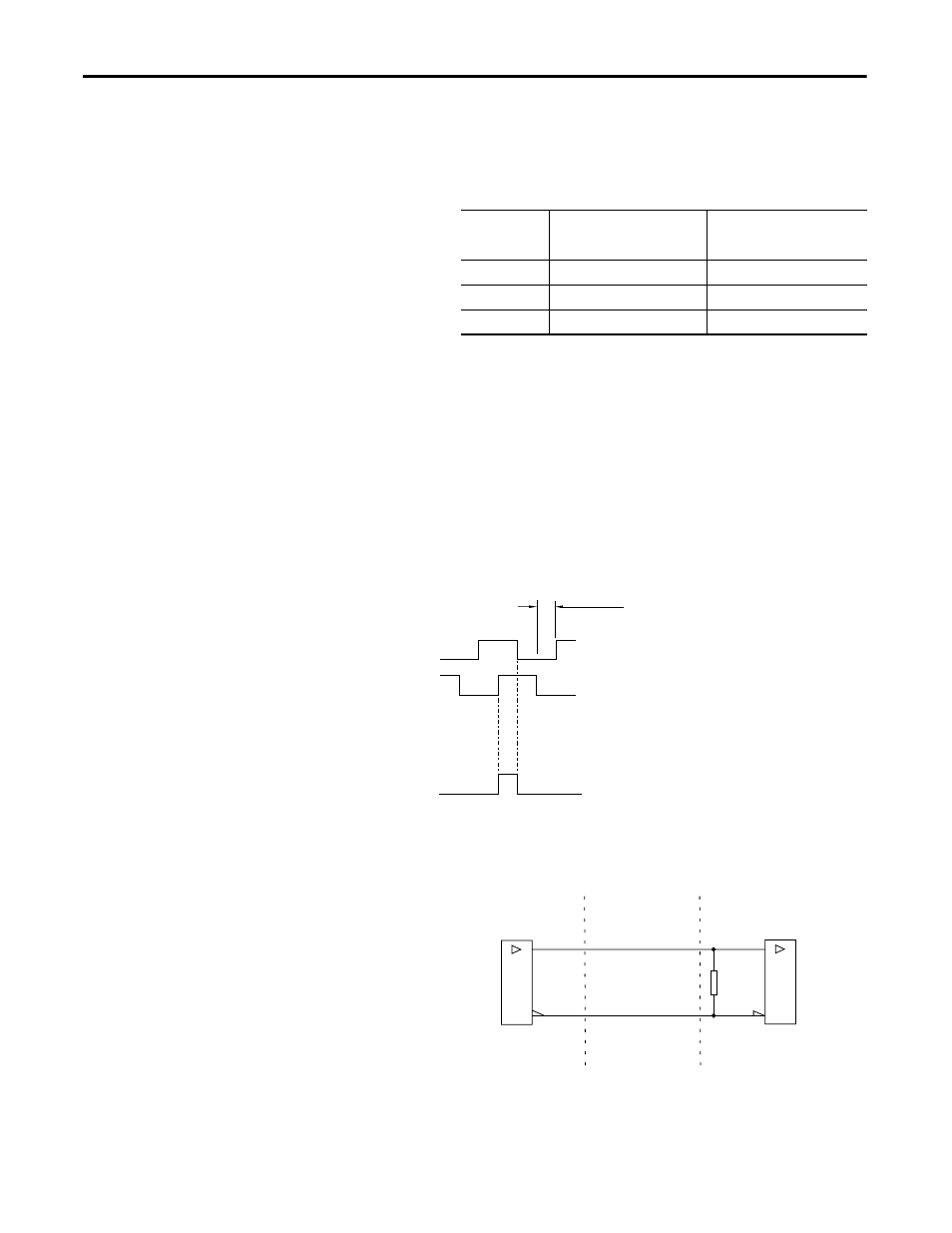
Figure 11 - TTL Differential Encoder Timing Diagram
Figure 12 - TTL Differential Encoder Termination
(1) Total termination resistance in ohms.
Encoder
Typical Edge Separation
@ Maximum Velocity
(1)
(1) Speeds based on 3 m maximum cable length and a minimum readhead input of 5V.
μm
ns
m/s
1 100
5
0.5
90 3
0.1
90 0.7
Counter clock frequency (MHz)
encoder velocity m s
⁄
(
)
resolution
μ
m
(
)
-----------------------------------------------------------
4
×
(safety factor)
=
Incremental 2 channels A and B in quadrature (90° phase shifted)
Quadrature edge separation
Reference
Index Mark pulse in synchronised to one
position count. Repeatability of position
(uni-directional) is maintained if temperature
is 15…35 °C (59…95 °F) and
speed is <250 mm/s (9.8 in./s).
ENC A+
ENC B+
Index
Mark +
Drive or
Controller
Standard RS422A
line receive circuit
Square wave differential
line driver to EIA RS422A
120 Ω
(1)
Readhead
ENC A +,
ENC B +,
& Index Mark +
ENC A -,
ENC B -,
& Index Mark -