Dynamics category – Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 97
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
97
MotionView Software Configuration
Chapter 5
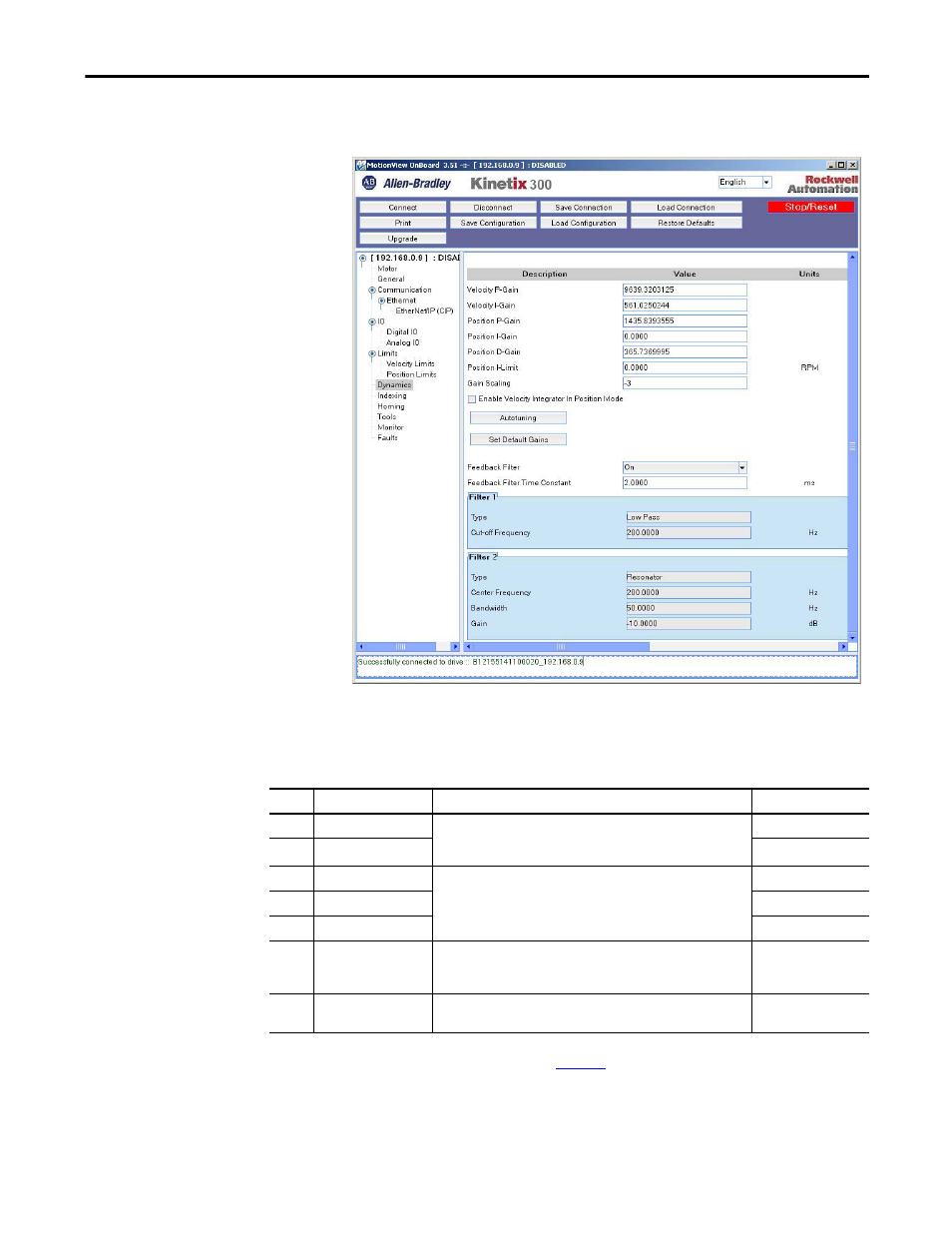
Dynamics Category
The Dynamics category provides access to the configuration of the modifiable
dynamics parameters.
Click Autotuning to begin autotuning.
Table 47 - Dynamics Category
See the Servo Loop diagram on
for more information on these
parameters.
ID
Parameter Name
Description
Value/Notes
44
Velocity P-Gain
The proportional and integral gain (respectively) of the velocity loops.
Gains are based on counts as the fundamental units and they are not
physical units.
Range: 0…32767
45
Velocity I-Gain
Range: 0…32767
46
Position P-Gain
The proportional, integral, and derivative gain (respectively) of the
position loops. Gains are based on counts as the fundamental units and
they are not physical units.
Range: 0…32767
47
Position I-Gain
Range: 0…16383
48
Position D-Gain
Range: 0…32767
49
Position I-Limit
A clamping limit on the position loop I-gain compensator to prevent
excessive torque overshooting caused by an over accumulation of the I-
Gain.
Range: 0…20000
51
Gain Scaling
A 2x factor applied to the gains in the velocity loop useful for scaling the
gains when using encoders with a high number of counts per revolution.
Range: -16…+4