Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 205
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
205
Kinetix 300 Drive ID Tag Numbers
Appendix C
26
8
DINT
R/
W
Upon transition fr
om 0 t
o 1 the dri
ve wi
ll begi
n
ex
ecuti
ng ind
ex.
0 t
o 1
transition = Ex
ec
ut
es indexin
g
1 t
o 0
transition = N
o e
ffe
ct
on indexi
ng
26
9
DINT
W
Va
lue
in this
tag
m
us
t change
befor
e time
-out time is
re
ac
hed
, other
w
ise the faul
t a
cti
on is
ini
tia
te
d.
Fu
nc
tion c
an be
used
with EtherNet/
IP expl
ici
t
me
ss
aging c
on
tr
ol
.
Cy
cle this
tag v
alue b
et
w
een 0 and 1
befor
e the time
-out period is
re
ached t
o pr
ev
ent
a w
at
chdog time
-out
and fault
.
27
0
DINT
R/
W
Enab
les the communic
ation w
at
chd
og func
tion.
Fu
nc
tion c
an be
used
with EtherNet/
IP expl
ici
t
me
ss
aging c
on
tr
ol
.
A v
alue of
1 ena
ble
s the
w
atchdog
m
ec
hani
sm
.
27
1
DINT
R/
W
Ti
me
-out v
alue
. F
un
ction t
o be used
with EtherNet/IP
explicit messaging con
tr
ol
. T
his tag se
ts the
windo
w
of
time befor
e the time
-out
oc
curs
and the fault is
ge
ner
at
ed
.
Ra
ng
e:
10
…
100
0 ms
62
4
DINT
R/W
Pr
ogr
ammable
input assignment
for input A4
0 = N
ot Assi
gned
1 =
Abo
rt Index
2 =
(R
es
er
ve
d)
3 =
S
ta
rt Ind
ex
4 =
D
ef
ine
Home
5 =
Abo
rt Homi
ng
6 =
S
ta
rt Hom
ing
7 =
F
aul
t Re
set
8 =
Index S
el
ec
t 0
9=
Index S
elec
t 1
10
= I
nde
x S
ele
ct
2
11
= I
nde
x S
ele
ct
3
12
= I
nde
x S
ele
ct
4
X
62
5
DINT
R/W
Pr
ogr
ammable
input assignment
for input B1
0 = N
ot Assi
gned
1 =
Abo
rt Index
2 =
(R
es
er
ve
d)
3 =
S
ta
rt Ind
ex
4 =
D
ef
ine
Home
5 =
Abo
rt Homi
ng
6 =
S
ta
rt Hom
ing
7 =
F
aul
t Re
set
8 =
Index S
el
ec
t 0
9=
Index S
elec
t 1
10
= I
nde
x S
ele
ct
2
11
= I
nde
x S
ele
ct
3
12
= I
nde
x S
ele
ct
4
X
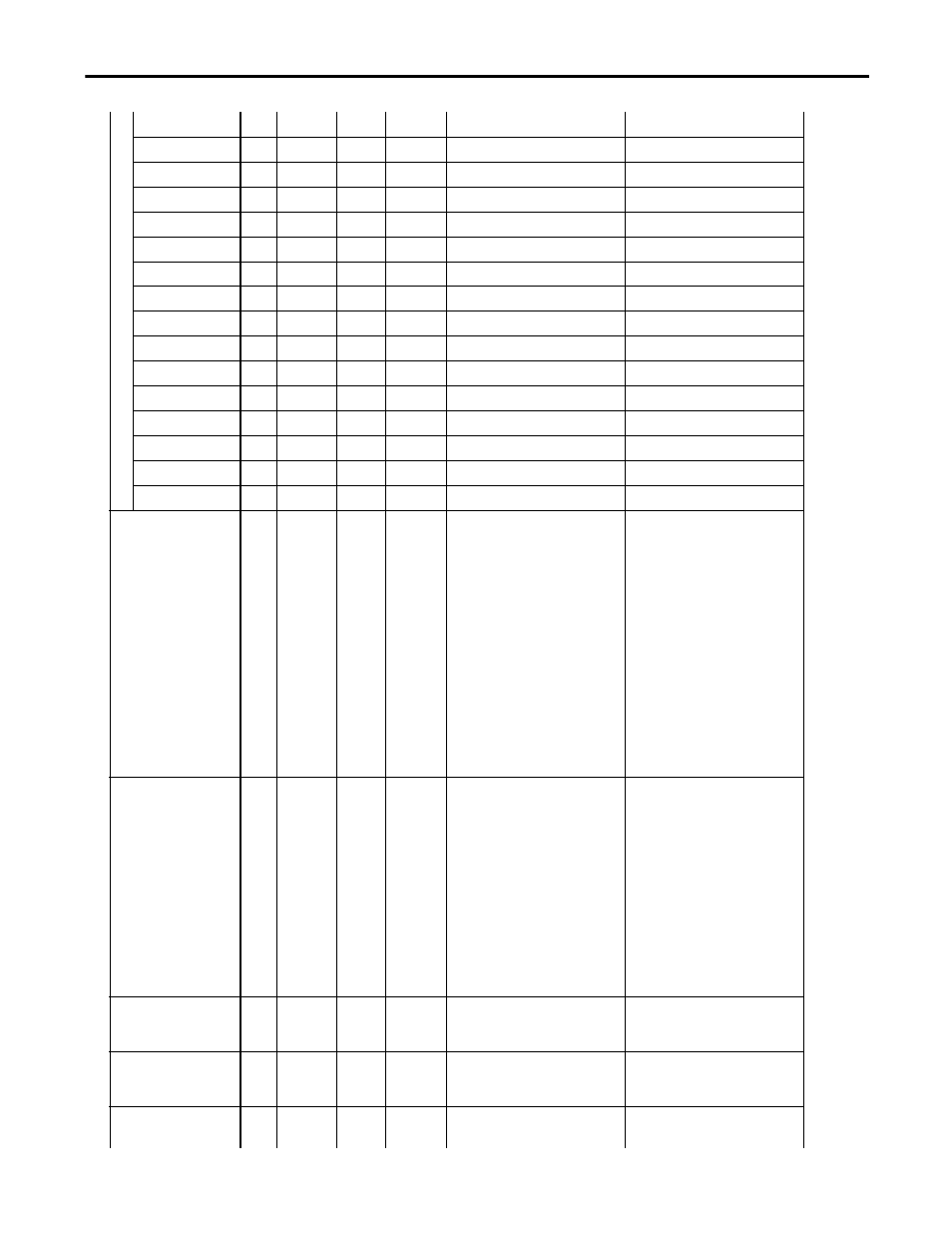
Ta
ble
78 -
Kinetix 300
D
riv
e
Ta
g Numbers (continued)
ID
Da
ta
Ty
p
e
A
ccess
D
escript
io
n
Value/Notes
Moti
onV
ie
w
P
ag
e
U
sed
Top
Lev
el
Motor-Synchronous
Motor-Line
ar
General -Synchronou
s
General -Linear
Ether
Net
Ether
Net
/IP (CIP
)
Digita
l I/O
Analog I/O
Veloci
ty Limi
ts
Posi
tio
n L
im
its
Dyn
am
ics
Indexing
Homi
ng
Monitor
Fau
lts