Operation – Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 219
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
219
Overtravel Inputs
Appendix E
Operation
If the drive is in a position operating mode, the overtravel limits are functional
and will generate an error when the overtravel is reached. The drive will not allow
axis movement in the direction of the overtravel limit until after the overtravel
fault is reset. Only movement in the opposite direction is allowed.
If the drive is in a non-positioning mode of operation, the overtravel limits are
functional and will generate an error when the overtravel is reached. However, it
is up to the controller (via programming) to manage recovery and axis position
after an overtravel fault. The drive will not limit axis movement once the fault has
been cleared.
An overtravel fault registers when the drive is enabled and motion causes the axis
to pass the overtravel switch. Once the overtravel is triggered, the drive performs
the configured Hard Limit Switches Action and drive is disabled.
An example of this is if the drive was in EtherNet/IP drive mode, had an
overtravel fault, and the overtravel fault is reset. If a value still exists in the
CommandCurrentOrVelocity parameter of the drive Add-on Profile, and that
value is in the incorrect direction, the axis will continue to move in that direction
regardless of overtravel condition.
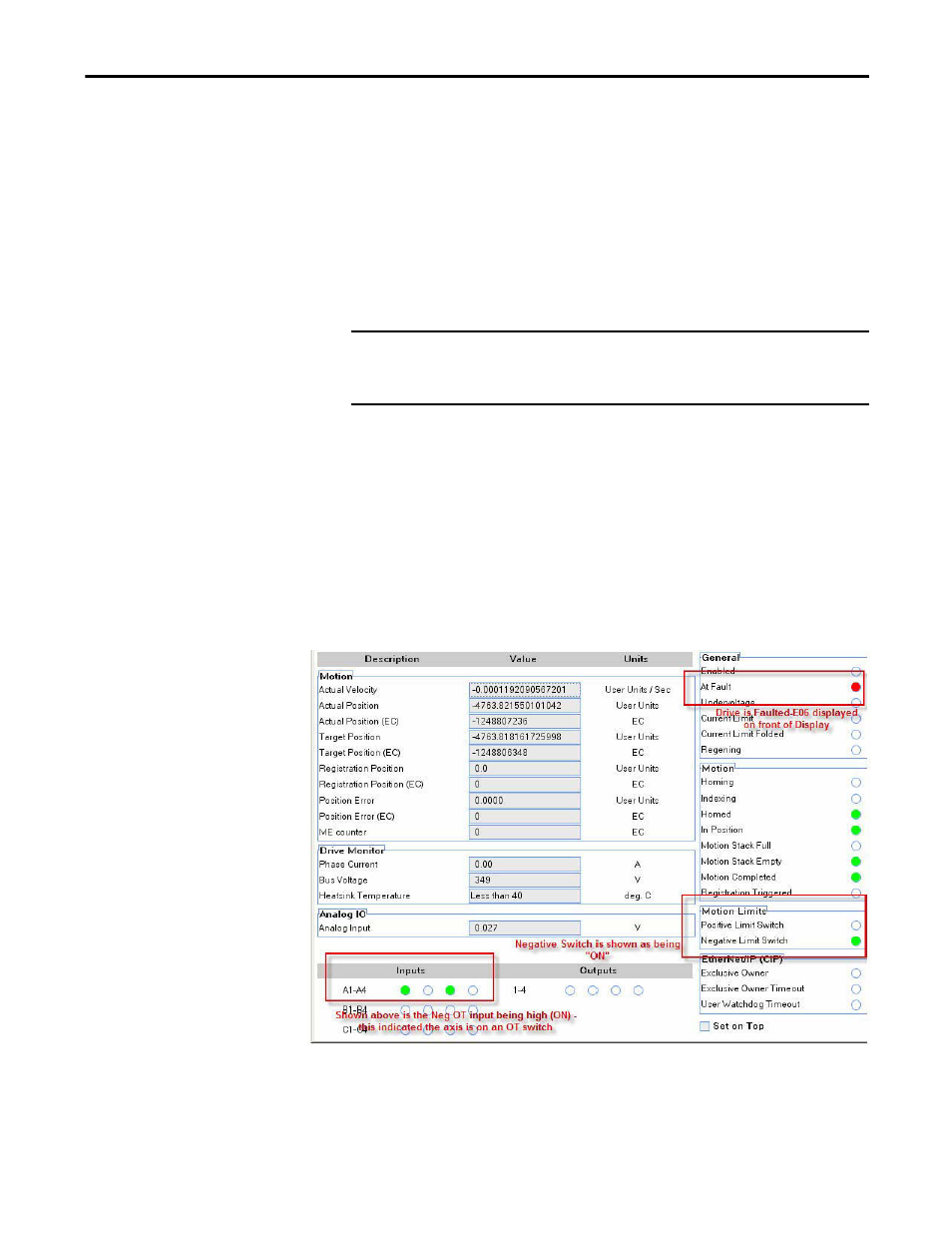
Figure 109 - MotionView Monitor Category
IMPORTANT
If an overtravel fault is reset and the drive is enabled while the axis is on or
beyond the overtravel limit, a runaway condition could occur when using the
overtravel limits in a non-positioning mode.