Keypad input – Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 126
126
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Chapter 6
Configure and Start Up the Kinetix 300 Drive
Keypad Input
The Kinetix 300 drive is equipped with a diagnostic status indicator and three
push buttons that are used to select displayed information and to edit a limited
set of parameter values. You can scroll the parameters by using
. To view a
value, press
. To return to Scroll mode press
again.
When you press
on editable parameters, the yellow status indicator (C)
blinks indicating that the parameter value can be changed. Use
to change
the value. Press
to store the new setting and return to Scroll mode.
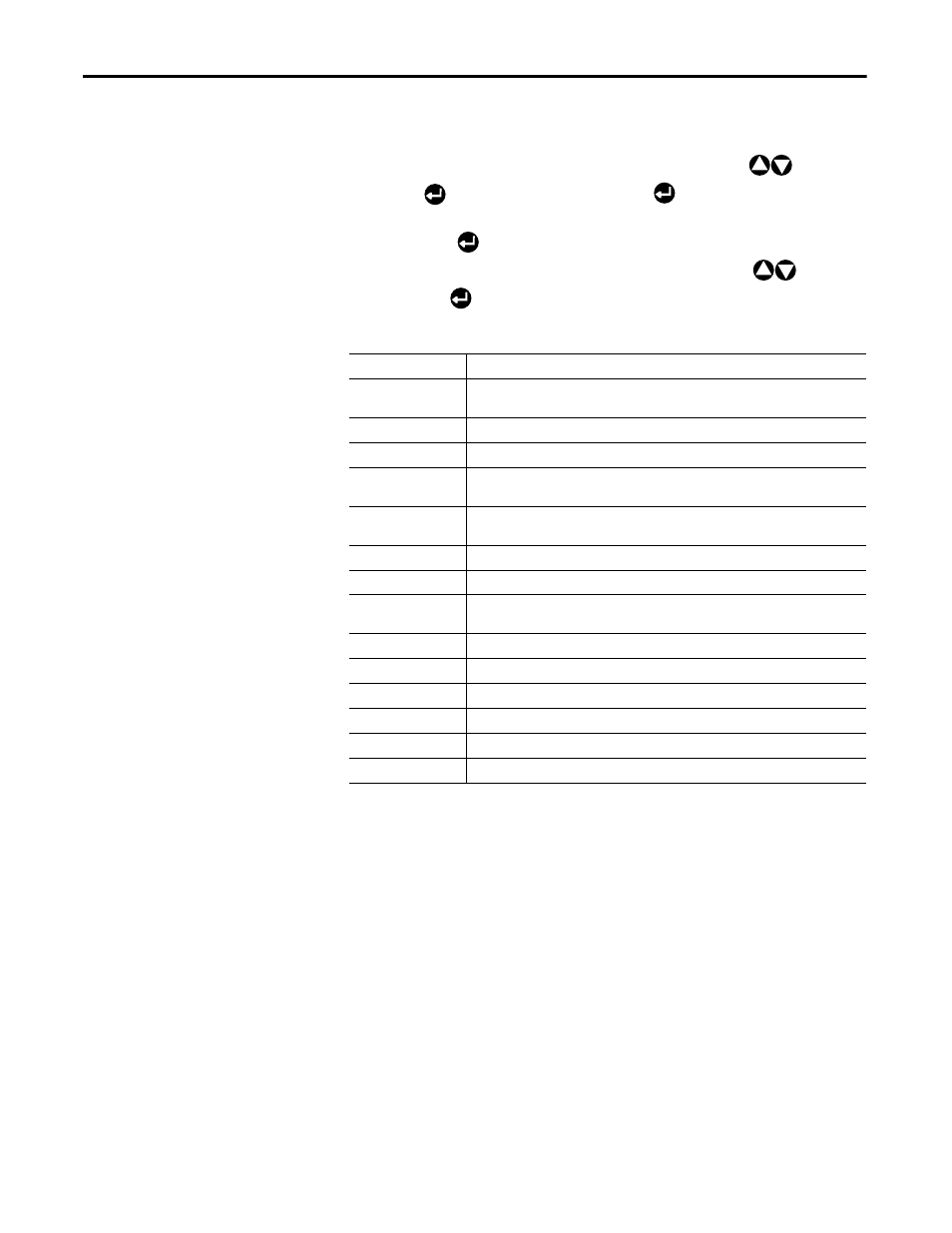
Table 60 - Status Display Information
Status Indicator
Description
StAt
Current drive status - run = drive running, diS = drive disabled, EXX = Drive fault, where XX
is the fault code.
Hx.xx
Hardware revision. For example, H2.00.
Fx.xx
Firmware revision. For example, F2.06.
FLtS
Stored fault's history. You can scroll through stored faults E0XX…E7XX, where XX is the
fault code.
Ht
Heatsink temperature. Heatsink temperature in is shown ºC if greater than 40 ºC. Otherwise
‘LO (low) is displayed.
EnC
Encoder activity. Primary encoder counts are displayed for encoder diagnostics.
buS
Displays drive DC bus voltage.
Curr
Displays motor's phase current (RMS). Shows current value if drive is enabled, otherwise
shows DiS.
boot
0 = autostart disabled, 1 = autostart enabled.
dHCP
Ethernet DHCP Configuration: 0=dHCP is disabled; 1=dHCP is enabled.
IP_1
First octet of the IP address.
IP_2
Second octet of the IP address.
IP_3
Third octet of the IP address.
IP_4
Fourth octet of the IP address (changeable).