Explicit messages for indexing – Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 110
110
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Chapter 5
MotionView Software Configuration
Explicit Messages for Indexing
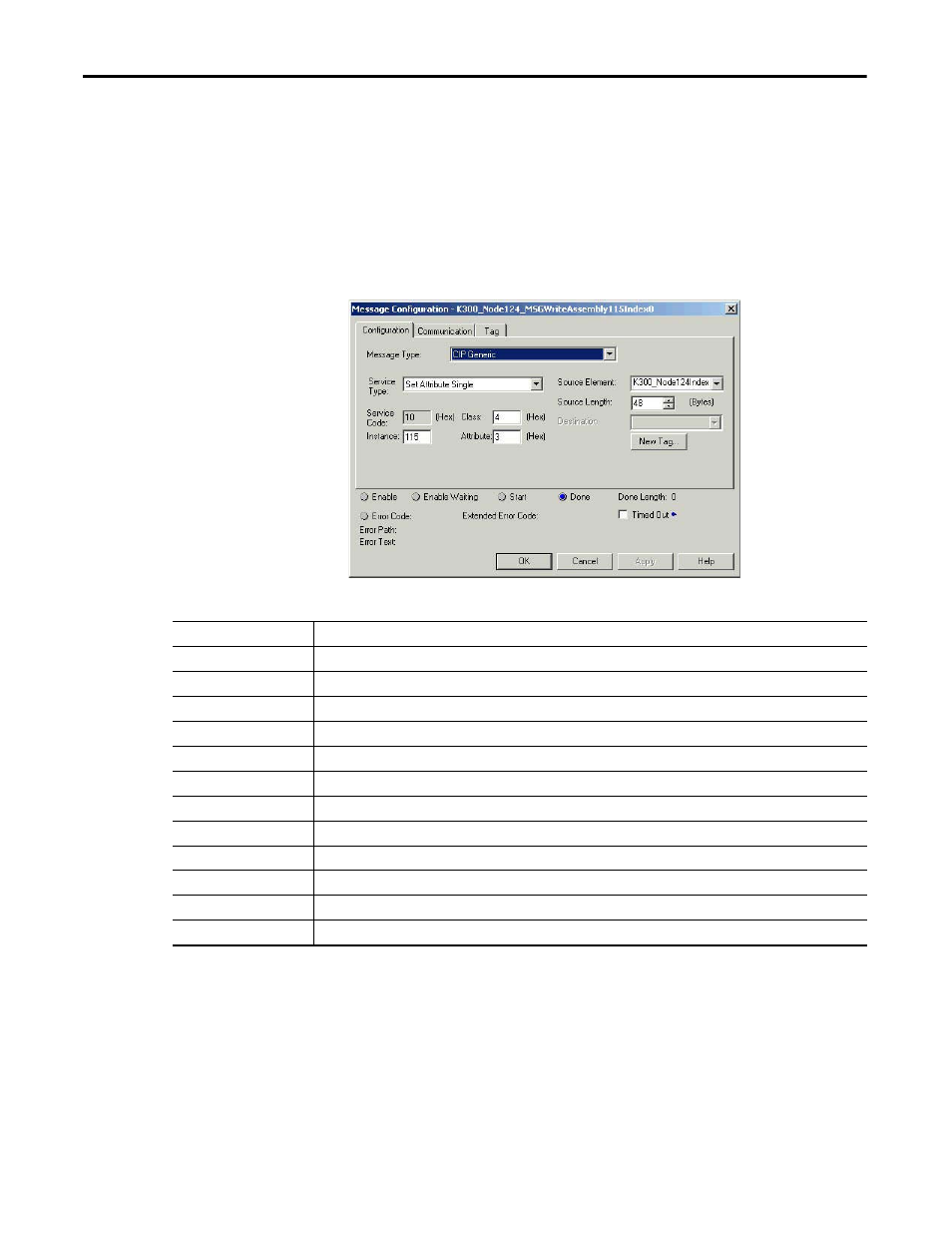
The Kinetix 300 drive provides an EtherNet/IP assembly for configuring all
parameters associated with a single index from within a single Explicit Message.
To do this, make a User-Defined type in the RSLogix 5000 or RSLogix 500
program that follows the structure below. Send the User-defined type in a Set
Attribute Single Explicit Message to class 4, instance 115 and attribute 3.
Figure 64 - Message Assembly Example
Table 53 - Explicit Messaging for Indexing
RSLogix 5000 Field
Description
Index Number
This DINT contains the index number that is being modified.
Index Type
This DINT contains the type of the index, absolute, incremental, registration or blended incremental.
Index Move Type
This DINT contains the move type of the index Trapezoidal or S-Curve.
Index Distance
This REAL contains the move distance of the index.
Index Batch Count
This DINT contains the number of times the index should execute before moving to the next index.
Index Dwell
This DINT contains the number of milliseconds the axis should remain at position before moving to the next index.
Index Velocity
This REAL contains the velocity the axis should move at while moving the specified distance.
Index Maximum Acceleration
This REAL contains the maximum acceleration the axis should use in reaching the index velocity.
Index Maximum Deceleration
This REAL contains the maximum deceleration the axis should use in when approaching the target position.
Index Next Index
This DINT contains the next index the drive should begin executing after completing this index.
Index Action
This DINT contains the action the drive should take once this index is complete.
Index Registration Distance
This REAL contains the displacement from the registration position the axis should move to if a registration index is used.