Position limits – Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 96
96
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Chapter 5
MotionView Software Configuration
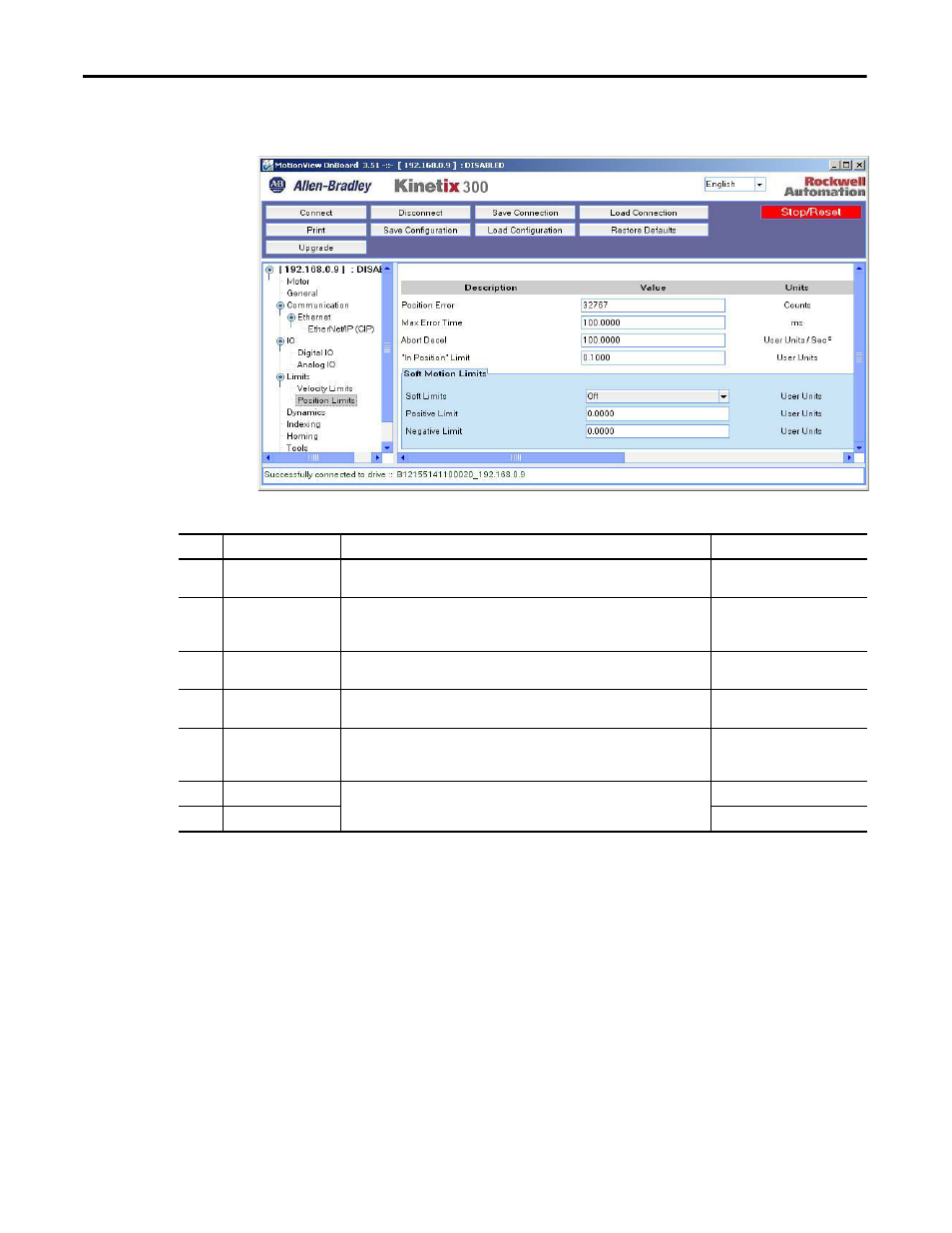
Position Limits
Table 46 - Position Limits Category
ID
Parameter Name
Description
Value/Notes
62
Max Error Time
The amount of time that the drive can be outside of the Position Error before the
drive asserts an Excess Position Error Fault.
Range: 0.25…8000 ms
178
Abort Decel
The deceleration rate that the drive will use to bring the motor to a stop when either
the Abort Homing or Abort Index Digital Inputs is asserted (if configured) or either
the AbortIndex or AbortHoming bit is set in the EtherNet/IP Output Assembly.
User units/s
2
179
Position Limit
The tolerance around the commanded position inside of which the drive will set the
PositionLockStatus bit in the EtherNet/IP Input Assembly.
User units
217
Position Error
The tolerance around the commanded position outside of which the drive will assert
a Excess Position Error Fault when the Max Error Time is exceeded.
Encoder counts
218
Soft Limits
(1)
Off or On depending if software travel limits should be used.
0 = Off
1 = Disable and Coast
2 = Ramped Decel and Disable
219
Positive Limit
If Soft Limits are On, the position that when reached, the drive will assert a Software
Overtravel fault.
User units
220
Negative Limit
User units
(1) Soft Limits parameters can only be used in Positioning mode.