Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 190
190
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Appendix B
Input and Output Assembly
Kinetix 300 drive parameters are modifiable by using Explicit Messaging.
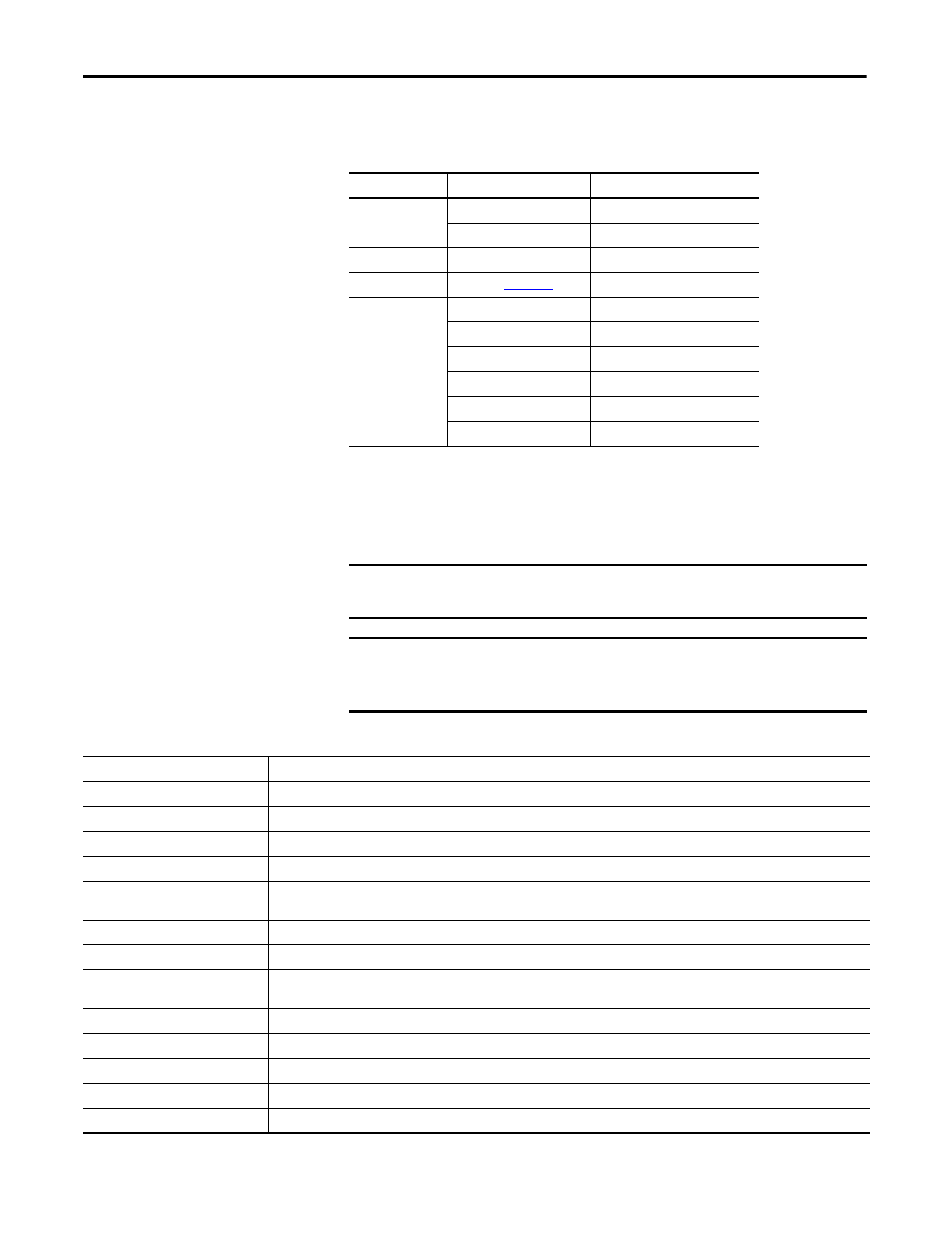
Table 69 - Drive Object Attributes
When a Kinetix 300 drive parameter is changed by using explicit messaging, the
Set Attribute Single message instruction is directed at this class, the instance is
the identifier of the actual parameter and the attribute depends upon the type of
data being written.
Attribute
Value
Comment
Service type
Get Attribute Single
Service code 0x0E (hex)
Set Attribute Single
Service code 0x10 (hex)
Class
374
Hex
Instance
–
Attribute
0
DINT, RAM
1
DINT, MEM
2
REAL, RAM
3
REAL, MEM
4
String, RAM
5
String, MEM
IMPORTANT
If power is removed from the drive, data stored in RAM is lost. Data stored in
the memory module remains through power cycles.
IMPORTANT
Memory module writes are limited to 1,000,000 per device. Make sure that
all writes targeted at the memory module are necessary and not done as
part of a background or cyclic task.
Table 70 - Input Assembly
RSLogix 5000 Tags
Description
Fault
A non-zero value in this field means the connection to the drive is not operational and no other fields in the Input Assembly should be used.
DriveEn
A non-zero value in this field means the drive is currently enabled and the servo loops are closed.
PhysicalAxisFault
A non-zero value in this field means the drive has faulted.
PositionLockStatus
A non-zero value in this field means the drive is within the position tolerance window of the commanded position.
CurrentLimitStatus
A non-zero value in this field means the drive has reached the current limit. This does not mean the drive is limiting current if the current
limit was set to a lower value than the drive or motor supports.
RegistrationEventStatus
A non-zero value in this field means the drive has captured a registration event and position.
IndexingStatus
A non-zero value in this field means the drive is currently operating out of the indexing table within the drive.
MotionComplete
A non-zero value in this field means the drive has completed a position based move. This bit does not apply when in Indexing Current
mode.
PositiveOvertravelInput
A non-zero value in this field means the positive overtravel input to the drive has been asserted.
NegativeOvertravelInput
A non-zero value in this field means the negative overtravel input to the drive has been asserted.
HomingStatus
A non-zero value in this field means the drive is currently homing as configured by the Homing section of the MotionView software.
AxisHomedStatus
A non-zero value in this field means the drive has been successfully homed.
VelocityStandstillStatus
A non-zero value in this field means the drive is within the configured tolerance for being at zero velocity.