Safe torque-off signal specifications – Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 168
168
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Chapter 8
Kinetix 300 Drive Safe Torque-off Feature
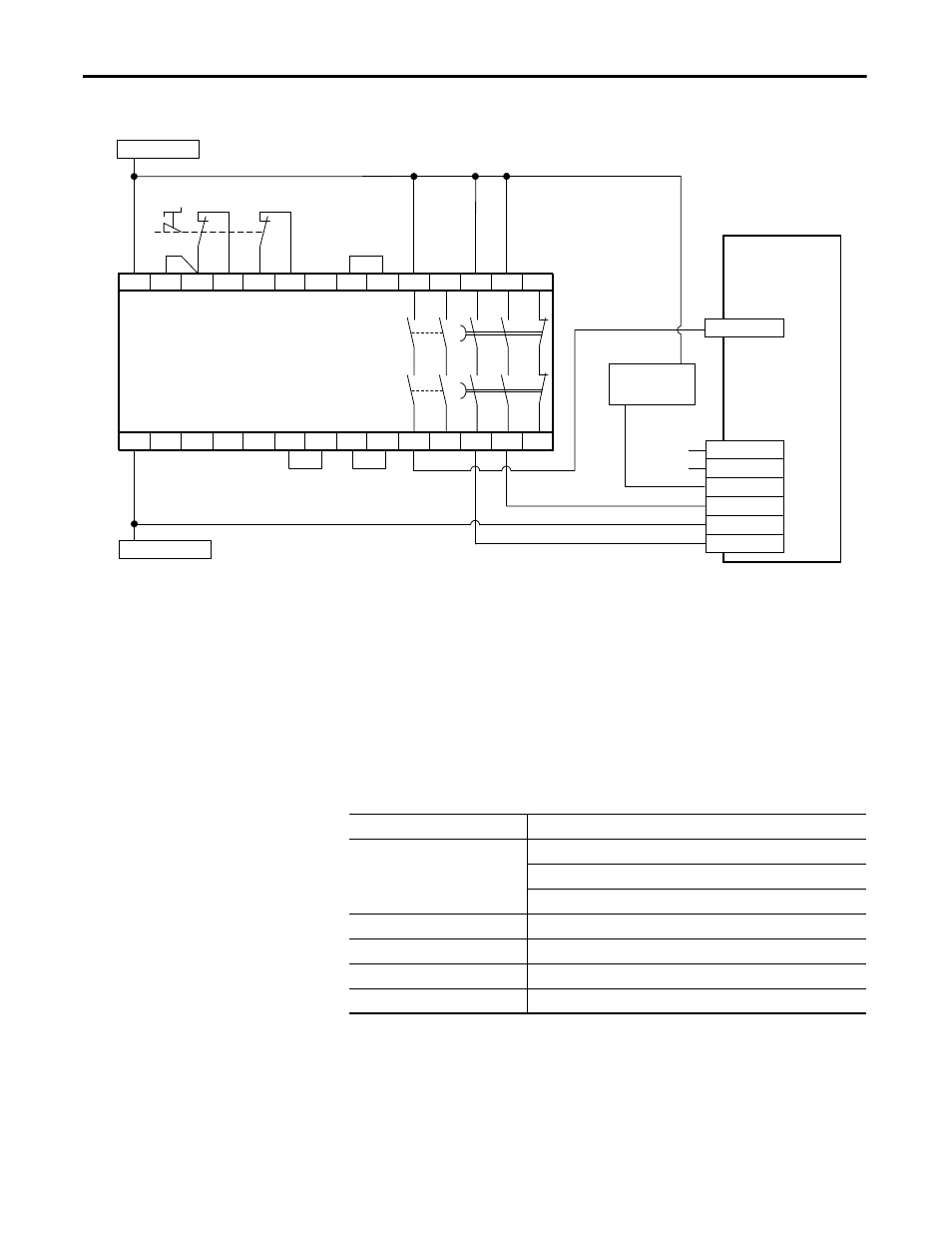
Figure 80 - Single-axis Relay Configuration (Stop Category 1) with Automatic Reset
(1) The digital input, configured for Abort Index in MotionView software, must be active-high when the safety function is requested, so
an interposing relay may be required to invert the signal. Digital input common (IN_x_COM) must be used in this signal activation/
de-activation transition.
You can also bring this input into a PLC where you can use an AOP (add on profile) or assembly object to activate the recommended
digital input (abort index).
Safe Torque-off Signal
Specifications
This table provides specifications for the safe torque-off signals used in the
Kinetix 300 servo drives.
A1
S52
S11
S12
S21
S22
S33
S34
13
23
37
47
57
A2
X1
X2
X3
X4
Y39
Y40
Y2
Y1
14
24
38
48
58
+24V DC
COM
Status
Safety Input 1
Safety Common
Safety Input 2
1
2
3
4
5
6
Allen-Bradley Monitoring Safety Relay
MSR138DP (440R-M23151)
External 24V COM
Safe Torque-off
External +24V DC
Kinetix 300 Drive
Safe Torque-off
(STO) Connector
I/O
(IOD) Connector
Auxiliary Signal
to PLC
Digital Input
(1)
Pins 1 and 2 are not used when using Safety Inputs.
Pin 3 is a sinking output.
Attribute
Value
Safety inputs
(1)
(1) Safety inputs are not designed for pulse testing.
Insulated, compatible with single-ended output (+24V DC)
Enable voltage range: 20…24V DC
Disable voltage range: 0…1.0V DC
Input impedance
6.8 k
Ω
Safety status
Isolated Open Collector (Emitter is grounded.)
Output load capability
100 mA
Digital outputs max voltage
30V DC