Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 201
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
201
Kinetix 300 Drive ID Tag Numbers
Appendix C
85
DINT
R/W
Analog output func
tion
0 =
Not a
ss
igne
d
1 =
Phas
e C
urr
ent (R
MS
)
2 =
Phas
e C
urr
ent (P
ea
k V
al
ue)
3 =
Mot
or V
el
ocit
y
4 =
Phas
e C
urr
ent U
5 =
Phas
e C
urr
ent V
6 =
Phas
e C
urr
ent W
7 =
Iq c
urr
ent
8 =
Id c
urr
ent
X
86
RE
AL
R/
W
Ana
log output sc
al
e f
or v
eloc
ity
quan
tities
Ra
nge:
0
…
10
mV/rpm
X
87
REAL
R/W
Analog output scale
for curr
en
t r
ela
te
d quantities
Ra
nge
: 0
…10
V
/A
X
88
RE
AL
W
Analog output v
alue
. Allows
con
tr
ol of analo
g output
thr
ou
gh this t
ag v
alue
. U
sed
if
ta
g #8
5 is
se
t t
o 0.
Ra
ng
e:
0
…
10
V
X
89
RE
AL
R/
W
Anal
og inp
ut #1 de
ad-
band. Ap
pl
ie
d when us
ed a
s
cu
rr
en
t o
r v
el
oc
ity
re
fe
re
nc
e.
Ra
nge
: 0
…
10
0 mV
X
90
RE
AL
R/
W
Analog inp
ut #1 offset
. A
pp
lied when used as c
urr
en
t/
ve
lo
ci
ty
re
fe
re
nc
e
Ra
nge
: -
10,00
0…+
10,00
0 m
V
X
17
8
RE
AL
R/
W
Th
e de
ce
le
ra
tion r
ate tha
t the d
riv
e wi
ll use
to
br
ing
the
motor to a
st
op whe
n ei
ther the Abor
t Hom
ing
or
Abor
t Index D
igital
Inputs
is asser
ted (if c
onf
igur
ed)
or
ei
ther
th
e A
bor
tI
nd
ex
or
Ab
or
tHoming
bit is set in the
EtherNet/
IP O
utput Asse
mbl
y.
U
ser uni
ts pe
r se
co
nds
2
X
17
9
DINT
R/
W
The t
oler
anc
e in user units ar
ound the c
ommanded
po
sition in
side of whic
h the driv
e will set the
PositionL
oc
kS
tatus bit in the E
ther
N
et/IP Input
As
se
mb
ly
.
Use
r u
nit
s
X
18
1
REAL
R/W
U
ser units
Rev
olutions of mot
or per
us
er unit
X
18
2
DINT
R/
W
En
co
de
r i
npu
t c
ou
nt
er
v
alu
e,
re
se
t b
y w
rit
in
g z
er
o o
r
othe
r v
al
ue to the pa
ra
me
te
r.
Co
un
ts
X
18
3
RE
AL
R
Ph
as
e cu
rr
en
t
Am
ps
X
18
4
DINT
R/W
Ta
rge
t p
osition
Enc
ode
r pulses
X
18
5
DINT
R/W
Ac
tual position
Enc
ode
r pulses
X
18
6
DINT
R
Position err
or
Enc
oder pulses
X
18
9
DI
N
T
R/W
In
put A1 de
-bounce ti
me
Ra
nge
: 0
…
10
00 m
s
X
19
0
DI
N
T
R/W
In
put A2 de
-bounce ti
me
Ra
nge
: 0
…
10
00 m
s
X
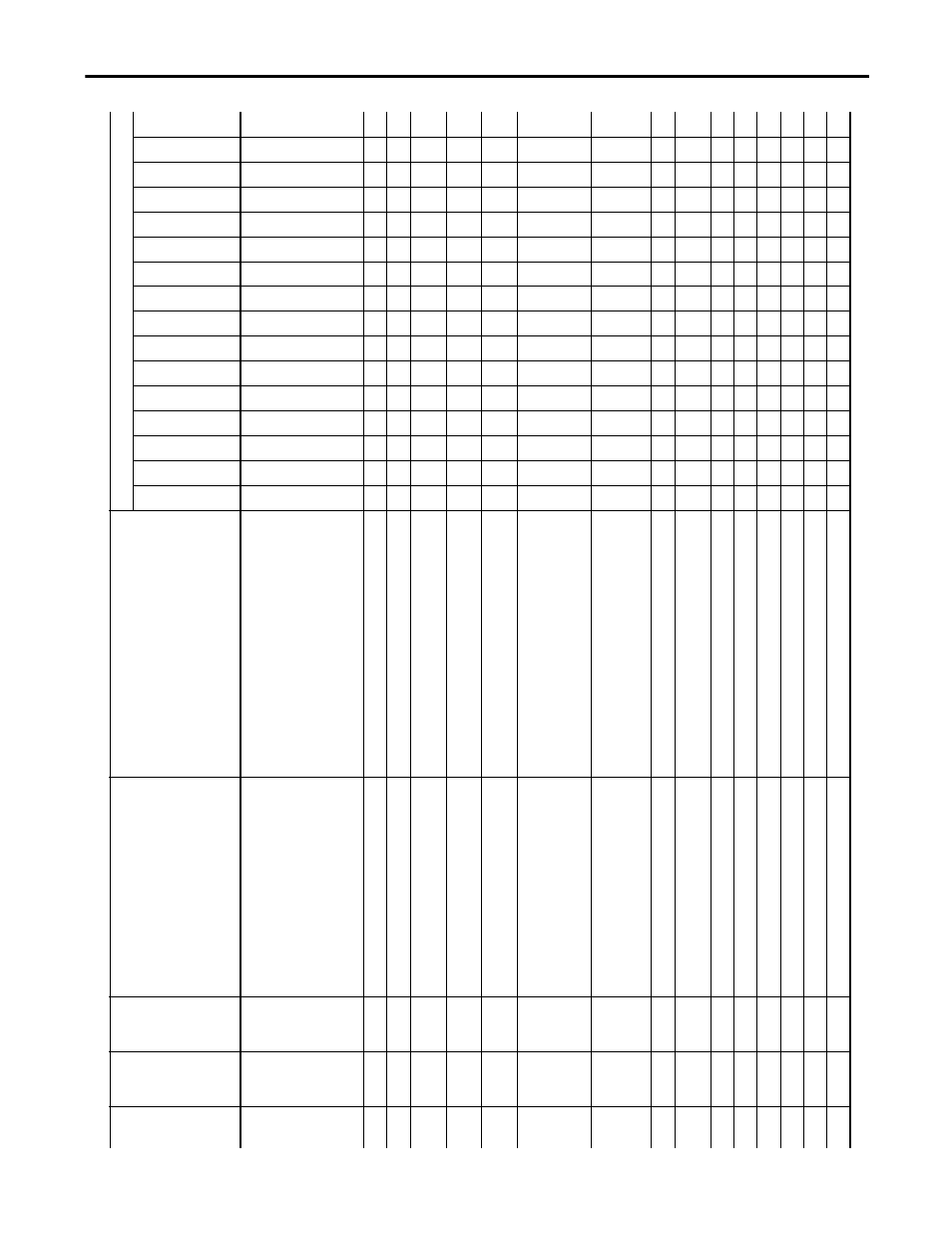
Ta
ble
78 -
Kinetix 300
D
riv
e
Ta
g Numbers (continued)
ID
Da
ta
Ty
p
e
A
ccess
D
escript
io
n
Value/Notes
Moti
onV
ie
w
P
ag
e
U
sed
Top
Lev
el
Motor-Synchronous
Motor-Line
ar
General -Synchronou
s
General -Linear
Ether
Net
Ether
Net
/IP (CIP
)
Digita
l I/O
Analog I/O
Veloci
ty Limi
ts
Posi
tio
n L
im
its
Dyn
am
ics
Indexing
Homi
ng
Monitor
Fau
lts