Homing methods timing diagrams, Homing methods 7…14 – Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 118
118
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Chapter 5
MotionView Software Configuration
Homing Methods Timing
Diagrams
For a summary of the homing methods, see
Homing Methods 7…14
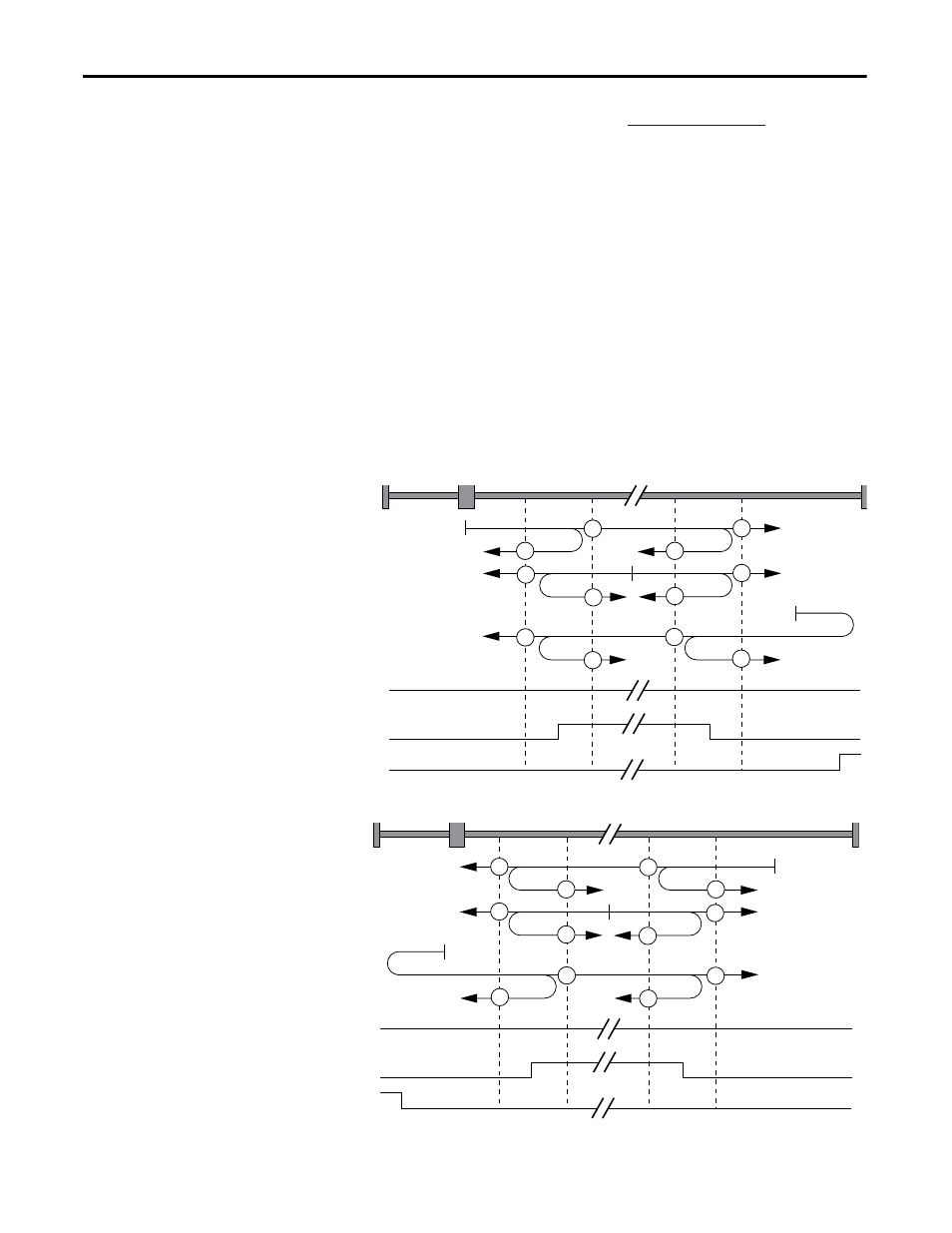
Homing methods 7…14 use a home switch that is active over only a portion of
the travel. In effect, the switch has a momentary action as the axis position sweeps
past the switch. Using methods 7…10, the initial direction of movement is
forward and by using methods 11…14, the initial direction of movement is
reverse, except if the home switch is active at the start of motion. In this case, the
initial direction of motion is dependent on the edge being sought. The home
position is at the index pulse on either side of the rising or falling edges of the
home switch, as shown in the following two diagrams. If the initial direction of
movement leads away from the home switch, the drive must reverse on
encountering the relevant limit switch. All of these methods use the fast
acceleration parameter.
Figure 66 - Homing Methods 7…10 (forward initial move)
Figure 67 - Homing Methods 11…14 (reverse initial move)
7
8
9
10
7
8
9
10
7
8
9
10
Index Pulse
Home Switch
Positive Limit Switch
11
12
13
14
11
12
13
14
11
12
13
14
Index Pulse
Home Switch
Positive Limit Switch