Rockwell Automation 2097-Vxxx Kinetix 300 EtherNet/IP Indexing Servo Drive User Manual User Manual
Page 202
202
Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Appendix C
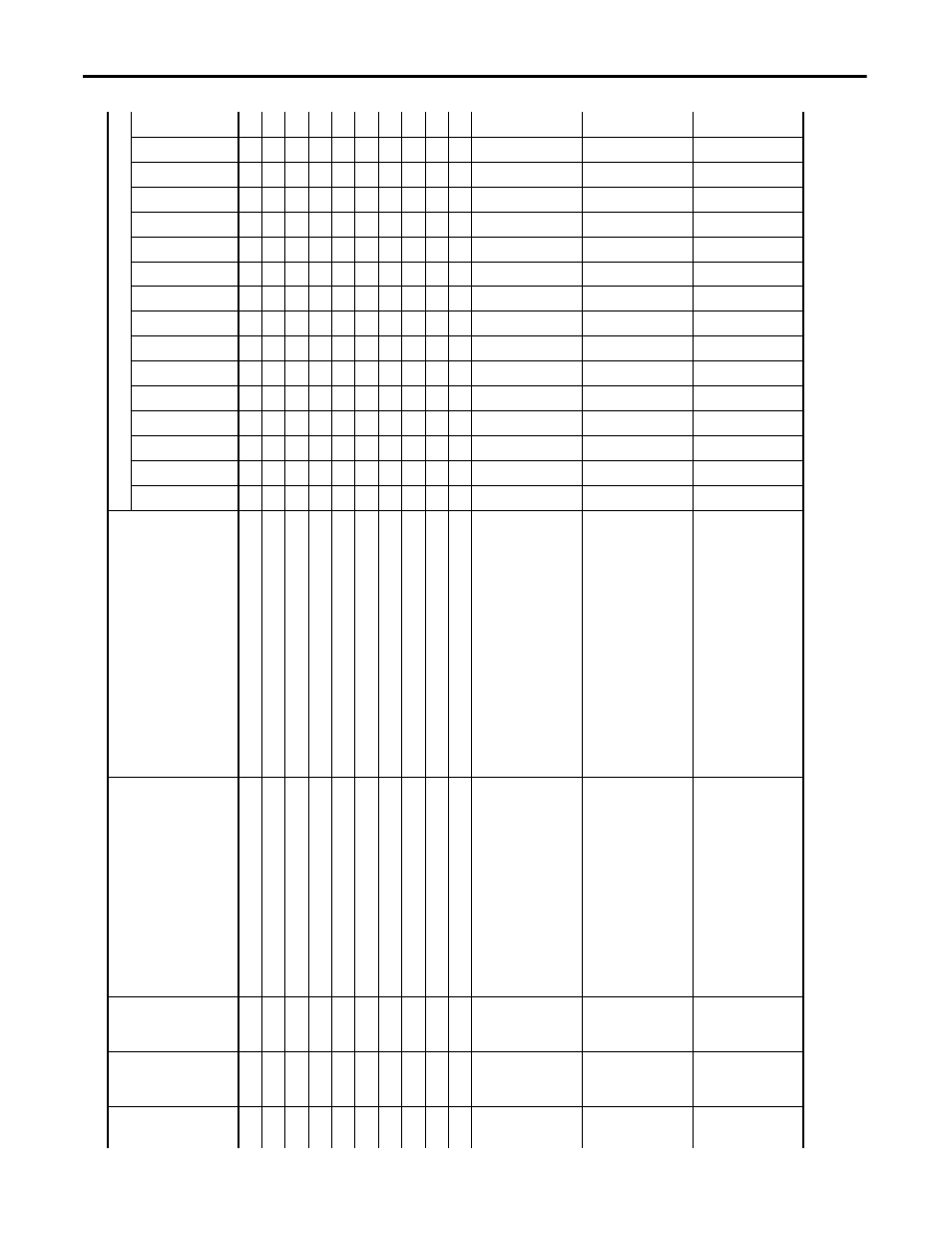
Kinetix 300 Drive ID Tag Numbers
19
1
DI
N
T
R/W
In
put A3 de
-bounce ti
me
Ra
nge
: 0
…
10
00 m
s
X
19
2
DI
N
T
R/W
In
put A4 de
-bounce ti
me
Ra
nge
: 0
…
10
00 m
s
X
19
3
DI
N
T
R/W
In
put B1
de
-bounc
e tim
e
Ra
nge
: 0
…
10
00 m
s
X
19
4
DI
N
T
R/W
In
put B2
de
-bounc
e tim
e
Ra
nge
: 0
…
10
00 m
s
X
19
5
DI
N
T
R/W
In
put B3
de
-bounc
e tim
e
Ra
nge
: 0
…
10
00 m
s
X
19
6
DI
N
T
R/W
In
put B4
de
-bounc
e tim
e
Ra
nge
: 0
…
10
00 m
s
X
19
7
DI
N
T
R/W
In
put C1 de
-bounce tim
e
Ra
nge
: 0
…10
00 m
s
X
19
8
DI
N
T
R/W
In
put C2 de
-bounce tim
e
Ra
nge
: 0
…10
00 m
s
X
19
9
DI
N
T
R/W
In
put C3 de
-bounce tim
e
Ra
nge
: 0
…10
00 m
s
X
20
0
DINT
R/
W
Input C4
de
-bounc
e ti
me
in m
S
Ra
nge:
0…1
00
0
X
20
1
DINT
R/W
Pr
ogr
ammable Output F
unc
tion: OUT1
0 = N
ot Assi
gned
1 =
Z
er
o Spe
ed
2 =
In S
pee
d W
indo
w
3 = C
urr
en
t Limit
4 =
Run ti
me
fau
lt
5 =
Re
ady
6 =
B
rak
e
7 =
In pos
iti
on
X
20
2
DINT
R/W
Pr
ogr
ammable Output F
unc
tion: OUT2
0 = N
ot Assi
gned
1 =
Z
er
o Spe
ed
2 =
In S
pee
d W
indo
w
3 = C
urr
en
t Limit
4 =
Run ti
me
fau
lt
5 =
Re
ady
6 =
B
rak
e
7 =
In pos
iti
on
X
20
3
DINT
R/W
Pr
ogr
ammable Output F
unc
tion: OUT3
0 = N
ot Assi
gned
1 =
Z
er
o Spe
ed
2 =
In S
pee
d W
indo
w
3 = C
urr
en
t Limit
4 =
Run ti
me
fau
lt
5 =
Re
ady
6 =
B
rak
e
7 =
In pos
iti
on
X
Ta
ble
78 -
Kinetix 300
D
riv
e
Ta
g Numbers (continued)
ID
Da
ta
Ty
p
e
A
ccess
D
escript
io
n
Value/Notes
Moti
onV
ie
w
P
ag
e
U
sed
Top
Lev
el
Motor-Synchronous
Motor-Line
ar
General -Synchronou
s
General -Linear
Ether
Net
Ether
Net
/IP (CIP
)
Digita
l I/O
Analog I/O
Veloci
ty Limi
ts
Posi
tio
n L
im
its
Dyn
am
ics
Indexing
Homi
ng
Monitor
Fau
lts