5motor control (mctrl) – Lenze 8400 BaseLine D User Manual
Page 90
5
Motor control (MCTRL)
5.5
Sensorless vector control (SLVC)
90
Lenze · 8400 BaseLine D · Reference manual · DMS 5.5 EN · 01/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
The operational performance can be adapted in the following ways:
• Overload limitation in the drive train
• The torque is limited via the torque setpoint.
• The torque setpoint is identical to the value at the output of the speed controller,
nOutputSpeedCtrl.
• To avoid overload in the drive train, the torque in motor mode can be limited via the
nTorqueMotLimit_a process input signal, and the torque in generator mode can be limited via
the nTorqueGenLimit_a process input signal:
• Motor current limitation
• A cross current setpoint is calculated from the torque setpoint which is limited depending on
the magnetising current, the max. current in motor mode (
) and the max. current in ge-
nerator mode (
).
• Here, the total current injected into the motor does not exceed the max. currents in motor
and generator mode.
•
• Using a slip model, the slip of the machine is reconstructed.
• The slip compensation (
) acts as the influencing parameter.
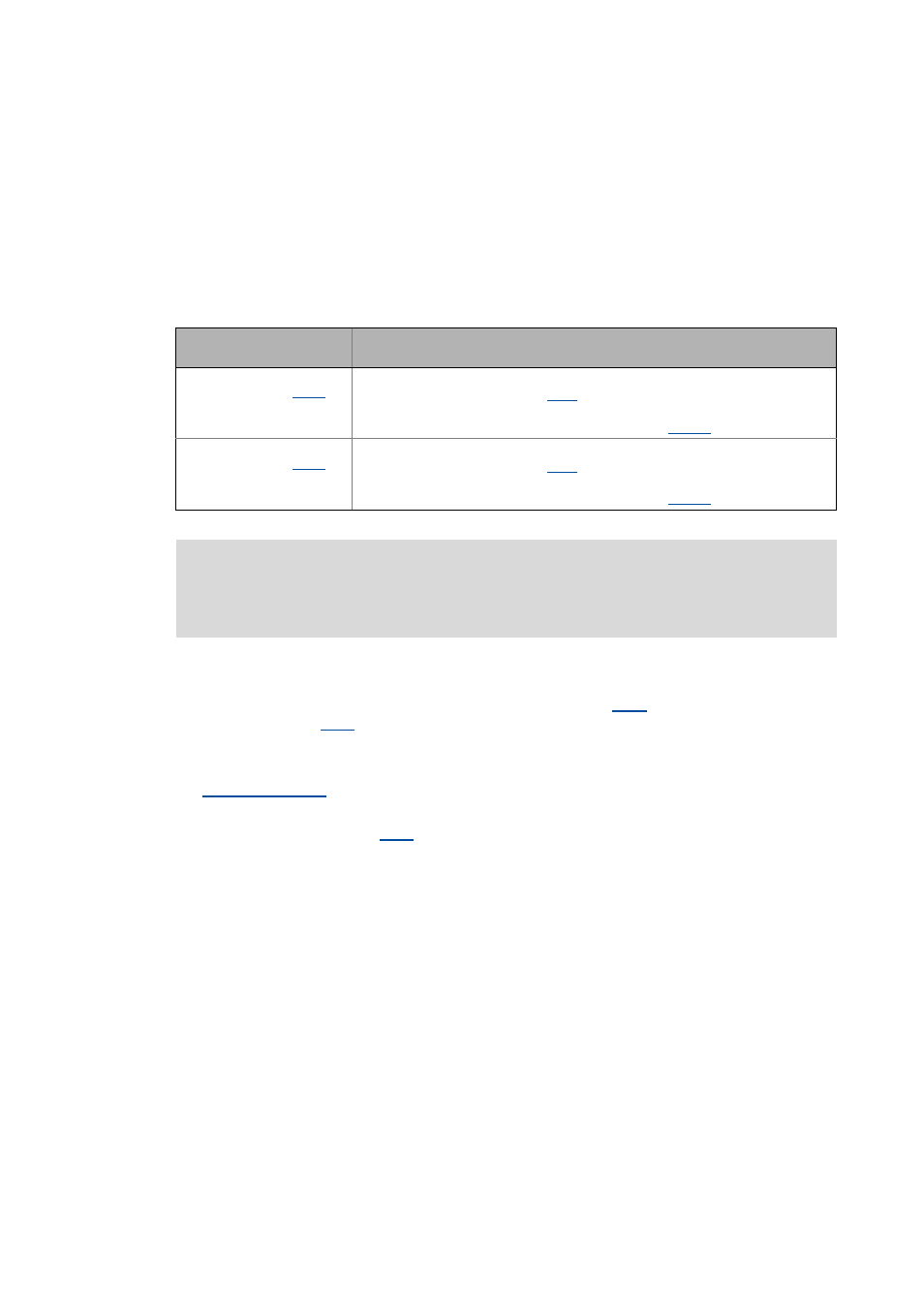
Identifier
DIS code | data type
Information/possible settings
nTorqueMotLimit_a
| INT
Torque limitation in motor mode
• Scaling: 16384 ≡ 100 % M
max
• Setting range: 0 … +199.9 %
• If keypad control is performed: Parameterisable via
nTorqueGenLimit_a
| INT
Torque limitation in generator mode
• Scaling: 16384 ≡ 100 % M
max
• Setting range: -199.9 ... 0 %
• If keypad control is performed: Parameterisable via
Note!
To avoid instabilities during operation, the torque limit values are internally processed
as absolute values.