2 automatic motor data identification, Automatic motor data identification, Subcha – Lenze 8400 BaseLine D User Manual
Page 71: Automatic, Motor data identification, 5motor control (mctrl)
Lenze · 8400 BaseLine D · Reference manual · DMS 5.5 EN · 01/2014 · TD05
71
5
Motor control (MCTRL)
5.1
Motor selection/Motor data
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.1.2
Automatic motor data identification
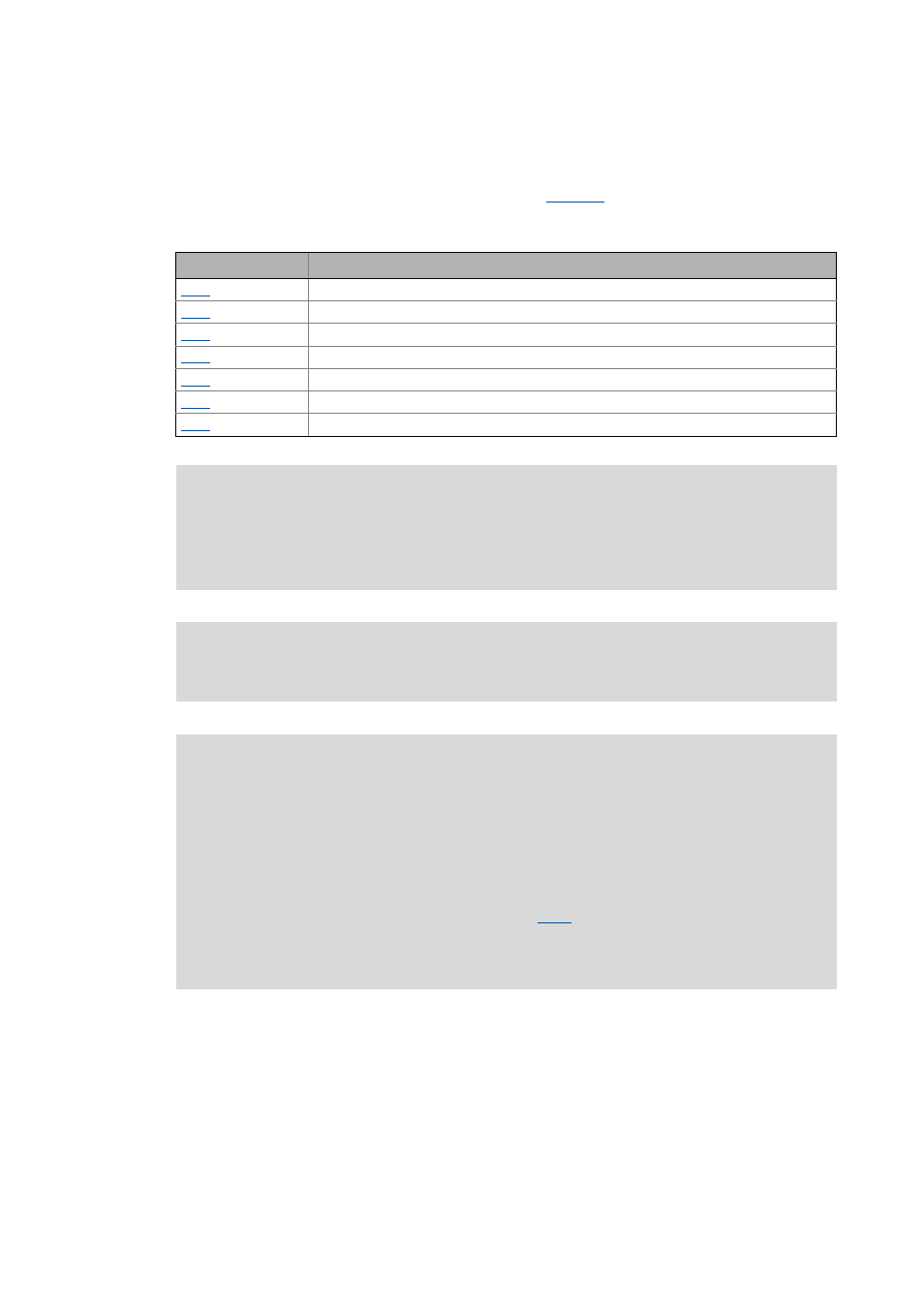
Via the "Identify motor parameters" device command " (
), the inverter characteristic, the in-
fluences of the motor cable, and the motor parameters listed in the table below can be identified
automatically:
Parameter
Info
V/f base frequency
V
min
boost
Slip compensation
Motor stator resistance
Motor stator leakage inductance
Motor magnetising inductance
Motor magnetising current
Danger!
During motor parameter identification, the motor is energised via the outputs U, V and
W of the controller!
Observe the corresponding safety instructions!
Stop!
If motor parameter identification is aborted, unstable drive behaviour may be the result!
Note!
• We strongly recommend motor parameter identification before the initial commis-
sioning of the sensorless vector control (SLVC).
• The motor parameter identification must be carried out when the motor is cold!
• The load machine may remain connected. Holding brakes, if present, may remain in
the braking position.
• With an idling motor, a small angular offset may occur at the motor shaft.
• The amplitude of the rated motor current (
) is injected to identify the stator re-
sistance. If the rated motor current amounts to less than 60 % of the rated inverter
current, at least 60 % of the rated inverter current will be injected to ensure sufficient
motor parameter identification accuracy.