2 interface description, Interface description, 7drive application – Lenze 8400 BaseLine D User Manual
Page 128
7
Drive application
7.2
Interface description
128
Lenze · 8400 BaseLine D · Reference manual · DMS 5.5 EN · 01/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.2
Interface description
Tip!
You can change the preconfigured assignment of the respective input via the configuration
parameters given in the first column.
User-defined terminal assignment
Inputs
Identifier
Data type
Configuration parameters
Information/possible settings
nMainSetValue_a
INT
Main speed setpoint
• Scaling: 16384 ≡ 100 % reference speed (
• The main setpoint is transformed to a speed setpoint in the setpoint encoder via
a ramp function generator with linear or S-shaped ramps.
• Upstream to the ramp function generator, a blocking speed masking function
and a setpoint MinMax limitation are effective.
• For a detailed functional description see FB
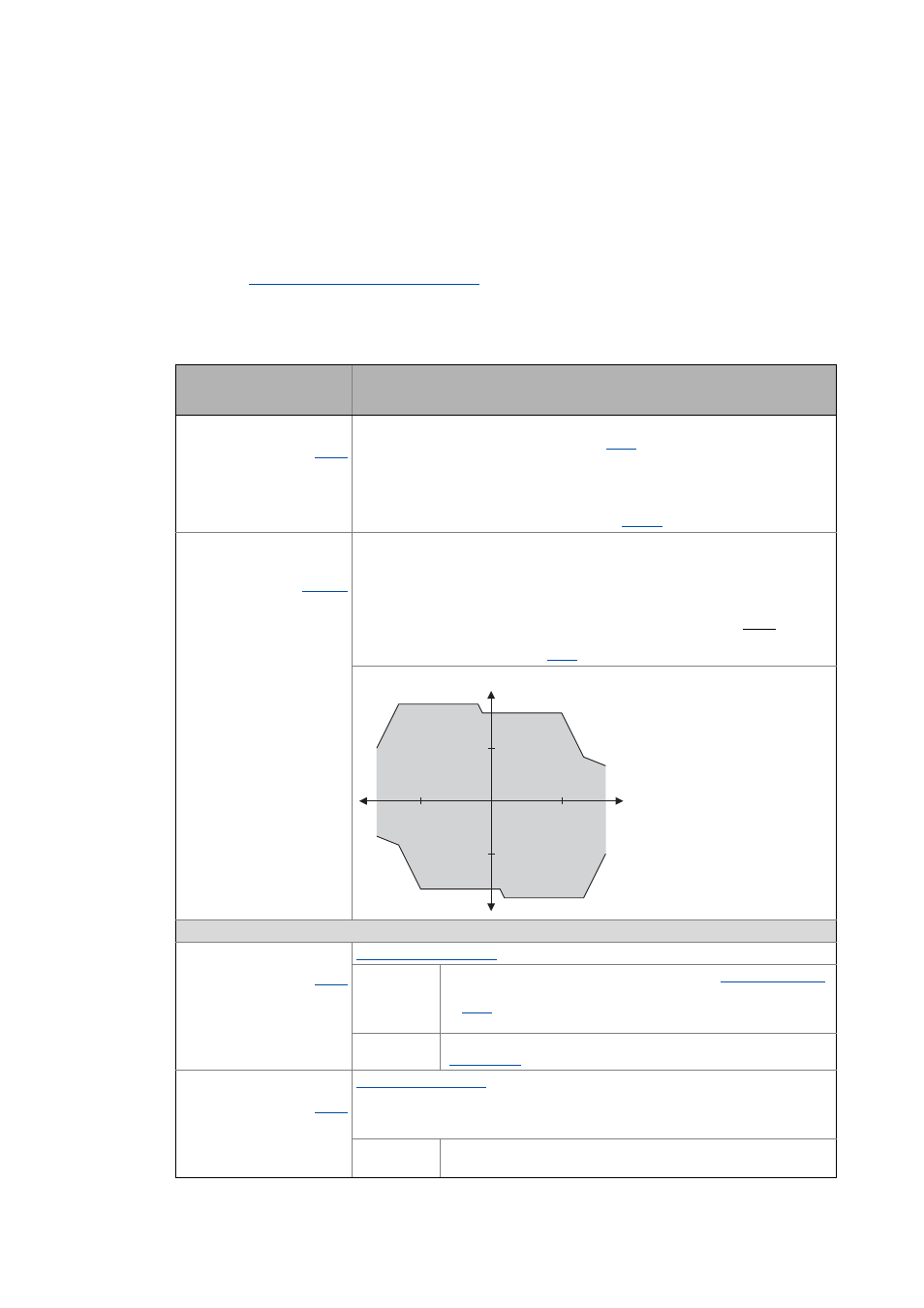
nTorqueMotLim_a
nTorqueGenLim_a
INT
Torque limitation in motor mode and in generator mode
• These input signals are directly transferred to the motor control to limit the con-
troller's maximum torque in motor and generator mode.
• The drive cannot output a higher torque in motor/generator mode than set here.
• The applied values (any polarity) are internally interpreted as absolute values.
• If sensorless vector control (SLVC) is selected, the limitation has a direct effect on
the torque-producing current component.
• Scaling: 16384 ≡ 100 % M
max
Torque limits in motor and generator mode:
Device control
bCInh
BOOL
FALSE Enable controller: The controller switches to the "
device state, if no other source of a controller inhibit is active.
•
provides a bit coded representation of all active sources/
triggers of a controller inhibit..
TRUE Inhibit controller (controller inhibit): The controller switches to the
" device state.
bFailReset
BOOL
In the Lenze setting this input is connected to the digital input controller enable so
that a possibly existing error message is reset together with the controller enable (if
the cause for the fault is eliminated).
TRUE The current fault is reset, if the cause for the fault is eliminated.
• If the fault still exists, the error status remains unchanged.
n
N
M
N
M
-M
N
-n
N
n
TorqueMotLim
TorqueGenLim
TorqueMotLim
TorqueMotLim
TorqueGenLim