4 controlling the spc11, Time behaviour in the positioning task – Festo Контроллер крайних положений SPC11 User Manual
Page 103
4. Commissioning
4-45
Festo P.BE-SPC11-SYS-EN en 1406e
4.4.4 Controlling the SPC11
You can move the mass into the saved end positions or inter-
mediate positions with the command inputs P.01...P.04.
When an end position is reached, the moveable mass will be
pressed against the stop with a pressure equal at maximum
to the operating pressure. When an intermediate position is
reached, the moveable mass stands controlled in that posi-
tion.
A 1-signal at the remote input deactivates the operating
buttons and activates the corresponding remote inputs
(pins 2...4). This makes it possible to manually travel over
external operating buttons or a higher-order PLC, for example
(Pin assignment, see section 3.3.2).
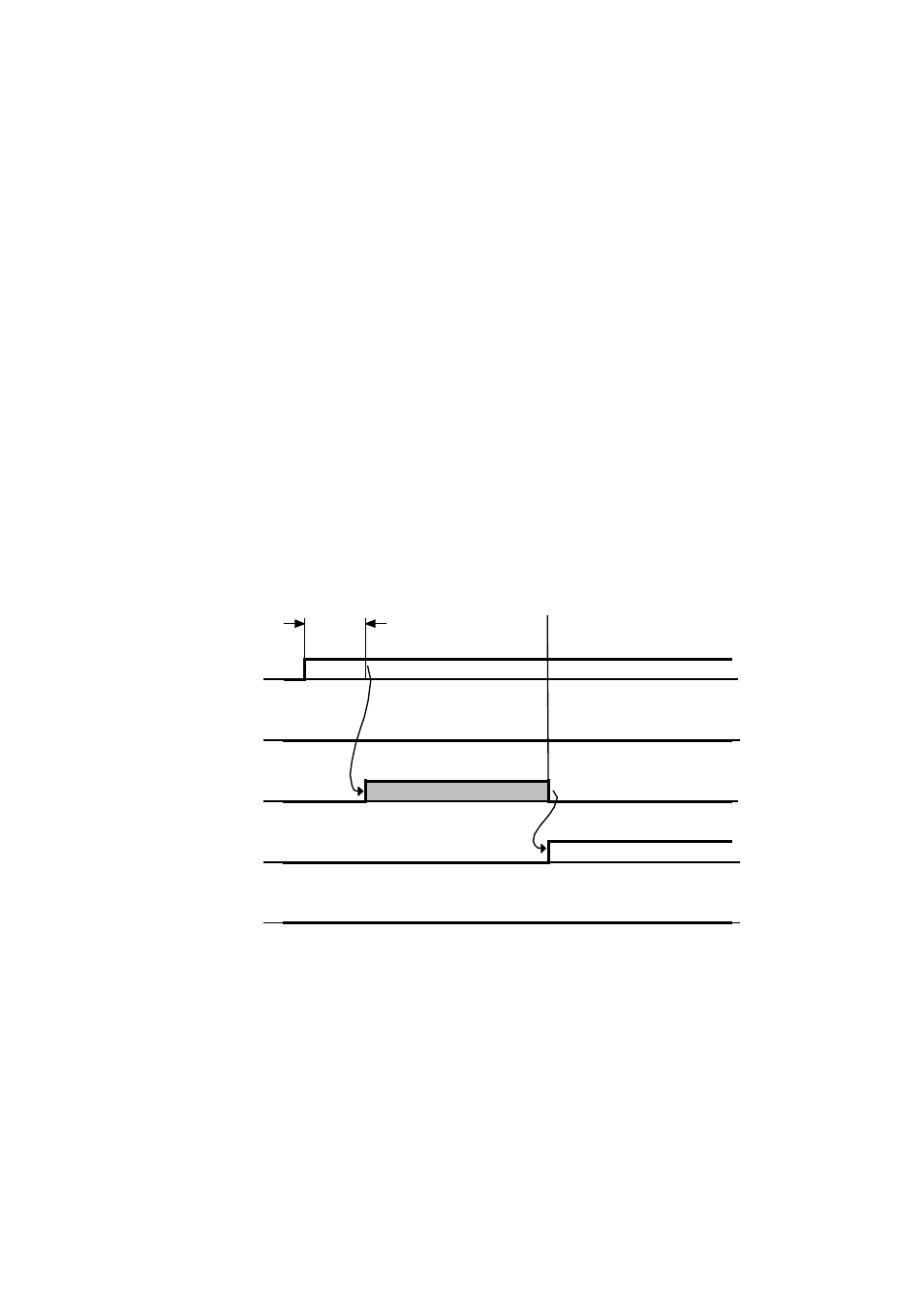
Time behaviour in the positioning task
I1: P.01
1
0
1
0
Drive
is moving
O1: P.01
min. 20 ms
1
1
0
O5: Error
1)
1
0
I2...4:
P.02...4
2
1)
Function of the O5 output can be configured (see 4.2.3); Error (factory setting) or Ready
1
Switch-on time at least 20 ms
2
End position (P.01) reached
Fig. 4/9: Time behaviour when starting a positioning task (example position 1)