Spectra Precision Survey Pro v4.6 Recon-Nomad Reference Manual User Manual
Page 359
Stakeout Menu – GPS & Basic GPS Module
R-351
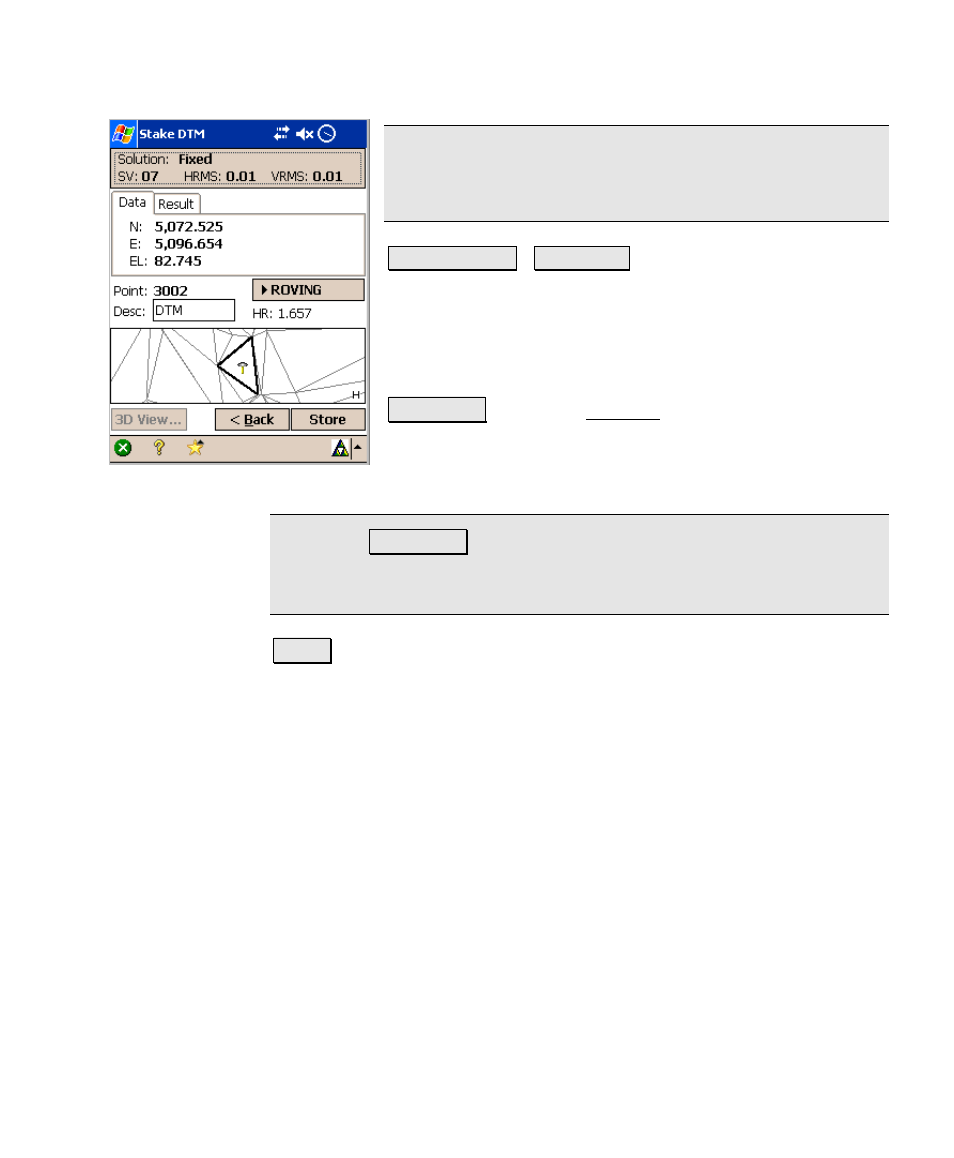
Note: the DTM boundary corners and TIN triangle may
not be visible depending on the current scale of the
screen.
OCCUPYING / ROVING : switches from ROVING to
OCCUPYING
mode. When ROVING, the receiver is in
dynamic mode and will calculate your position as you
move to the point. When OCCUPYING, the receiver is
switched to static mode and will calculate the most
precise position for the staked point.
3D View… : opens the 3D View screen (consult the
conventional surveying Reference manual) where a 3D
view of the DTM can be viewed from any angle as well
as cut / fill information for the current location.
Note: The 3D View… button is only available when Generate TIN
w\Staked Points
is checked in the previous screen and at least three
stake points have been stored.
Store : stores a point at the current rover location with the point
name shown in the St Pt field and the description in the Desc field.
Also advances the St Pt to the next available point name.
St Pt
: is the point name that will be assigned to the next stored point.
Desc
: is the description that will be assigned to the next stored point.
HR
: is the height of the rod.
Data
: shows the northing, easting, and elevation of the current rover
location.
Result
: shows the computed elevation of the DTM at the current
location and the cut or fill necessary to bring the elevation at the
current location to the elevation of the DTM at the current location.