0 ratio (pid) controller, 1 ratio (pid) controller operation overview, 0 - ratio (pid) controller – Micromod Micro-DCI: 53SL5100A Single Loop Controller User Manual
Page 83: Figure 7-1. ratio (pid) controller process loop, Section 7, ratio (pid) controller
Single Loop Process Controller Instruction Manual
Ratio (PID) Controller 75
7.0 Ratio (PID) Controller
7.1 Ratio (PID) Controller Operation Overview
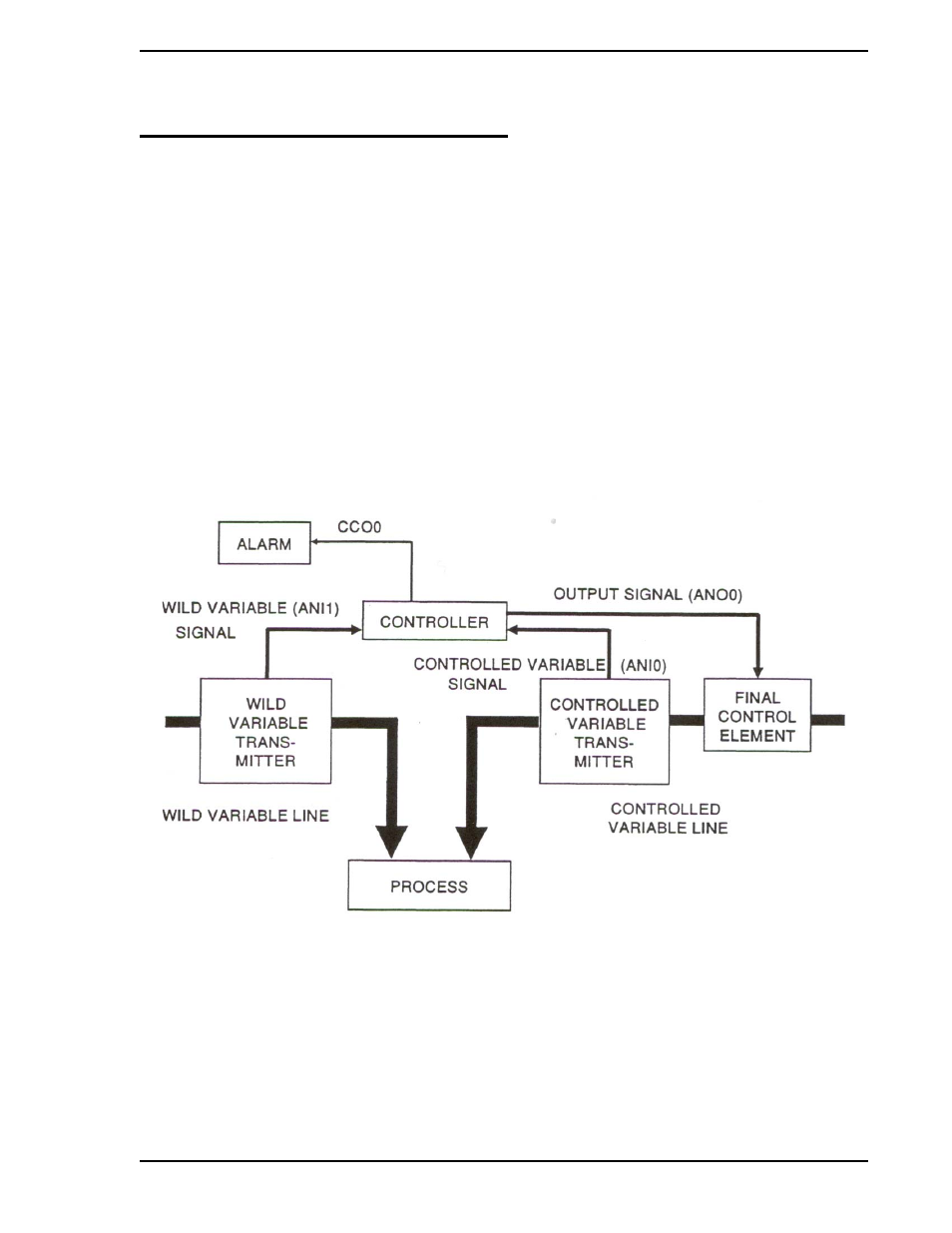
The Ratio (PID) Controller is used where one variable, called the controlled variable, must be automatically
maintained in definite proportion to another variable, called the wild variable.
Transmitting meters (e.g., flow meters) must be installed in each variable line. Signals from the controlled
and wild variable meters (Analog Input 0 and Analog Input 1, respectively) are received by the Ratio Con-
troller, which compares them and calculates the required correction that is applied as an output signal
(Analog Output 0) to a final control element (e.g, valve) in the controlled variable line. The final element in
the controlled variable line is controlled to alter line throughput so that the predetermined ratio between the
two lines is maintained.
The predetermined ratio is set at the controller front panel with the Ratio/Local (R/L) pushbutton in R. If the
proportion between the wild variable and the controlled variable can not be maintained, the controller acti-
vates a signal (CCO0) to an alarm. These events are illustrated in
.
While in Ratio (R) control, the setpoint pushbuttons modify the desired ratio value (controlled variable to
wild variable) by altering the location of the ratio tick bar, which is immediately covered by the setpoint
arrow indicator when the push button is released. Because the setpoint indicator moves to cover the ratio
tick bar, altering the ratio setting indirectly affects the setpoint value. When in Local (L) control, the push-
buttons modify only the setpoint value. In Local control, the controlled variable line functions as a Standard
Feedback Control Loop (see
).
Figure 7-1.
Ratio (PID) Controller Process Loop