Adept s800 s800 User Manual
Page 97
Chapter 6: Optional Equipment Installation
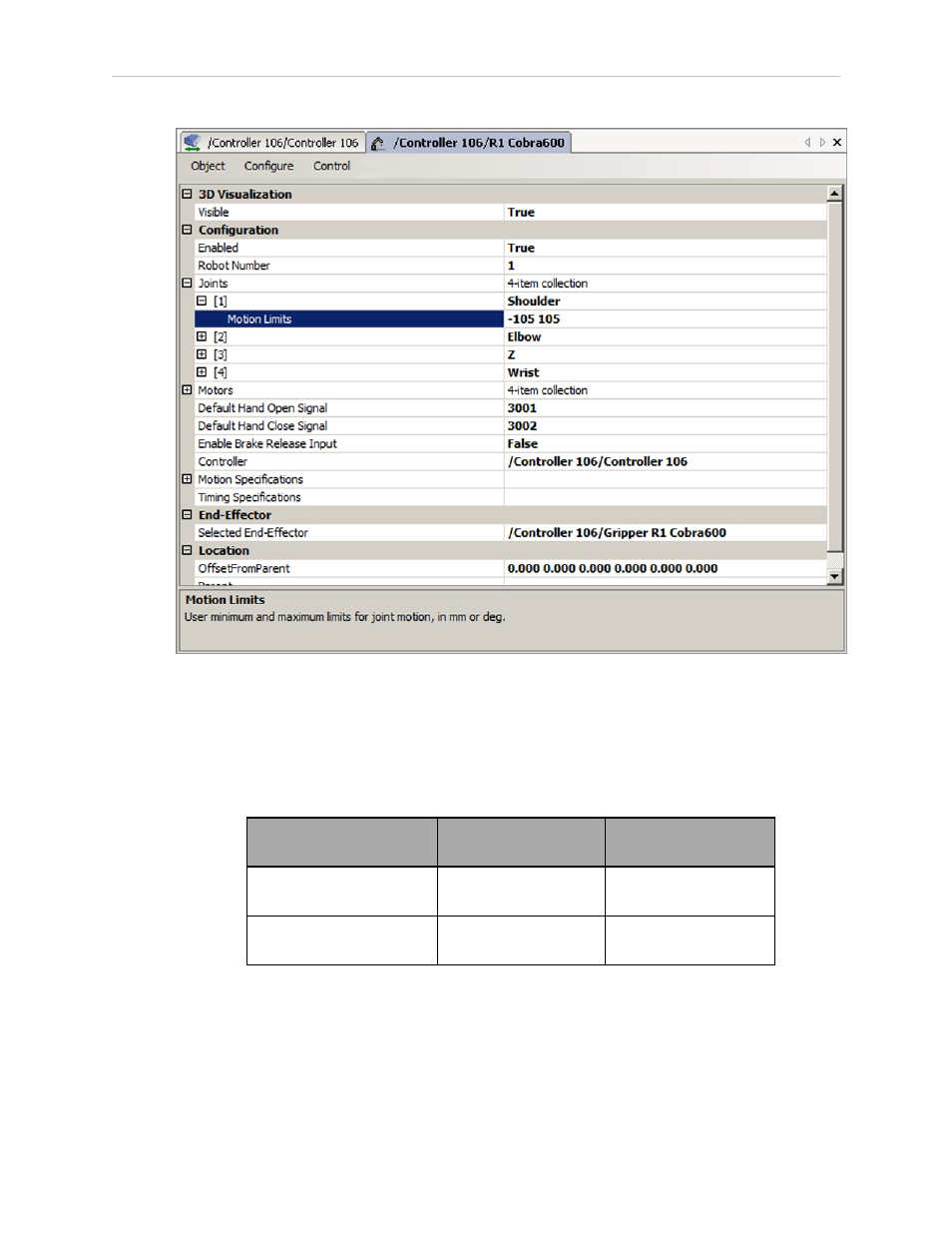
Figure 6-19. Robot Editor, with Joint 1 Expanded
5. Highlight the current values for joint 1, and replace them with the new values. See the
following table for recommended softstop values for Position 1 or Position 2.
Table 6-7. Joint 1 Ranges for Adjustable Hardstops
Hardstop Value
Recommended
Joint Limit Softstop
J1 Hardstop Position 1
± 93.5°
Lower limit: – 92.5°
Upper limit: + 92.5°
J1 Hardstop Position 2
± 114°
Lower limit: – 113°
Upper limit: + 113°
6. Once you have modified the upper and lower joint limit softstops, you must reboot the
system by cycling 24 VDC power to the SmartController. The new joint limits will be in
affect when the system reboot is done.
Adept Cobra s800 Inverted Robot User's Guide, Rev H1
Page 97 of 142