Adept s800 s800 User Manual
Page 129
Chapter 9: IP-65 Option
4. Unscrew the collar nut on the top of the outer link—see Figure 9-5.
5. Remove the two screws and nylon washers on the top of the outer link.
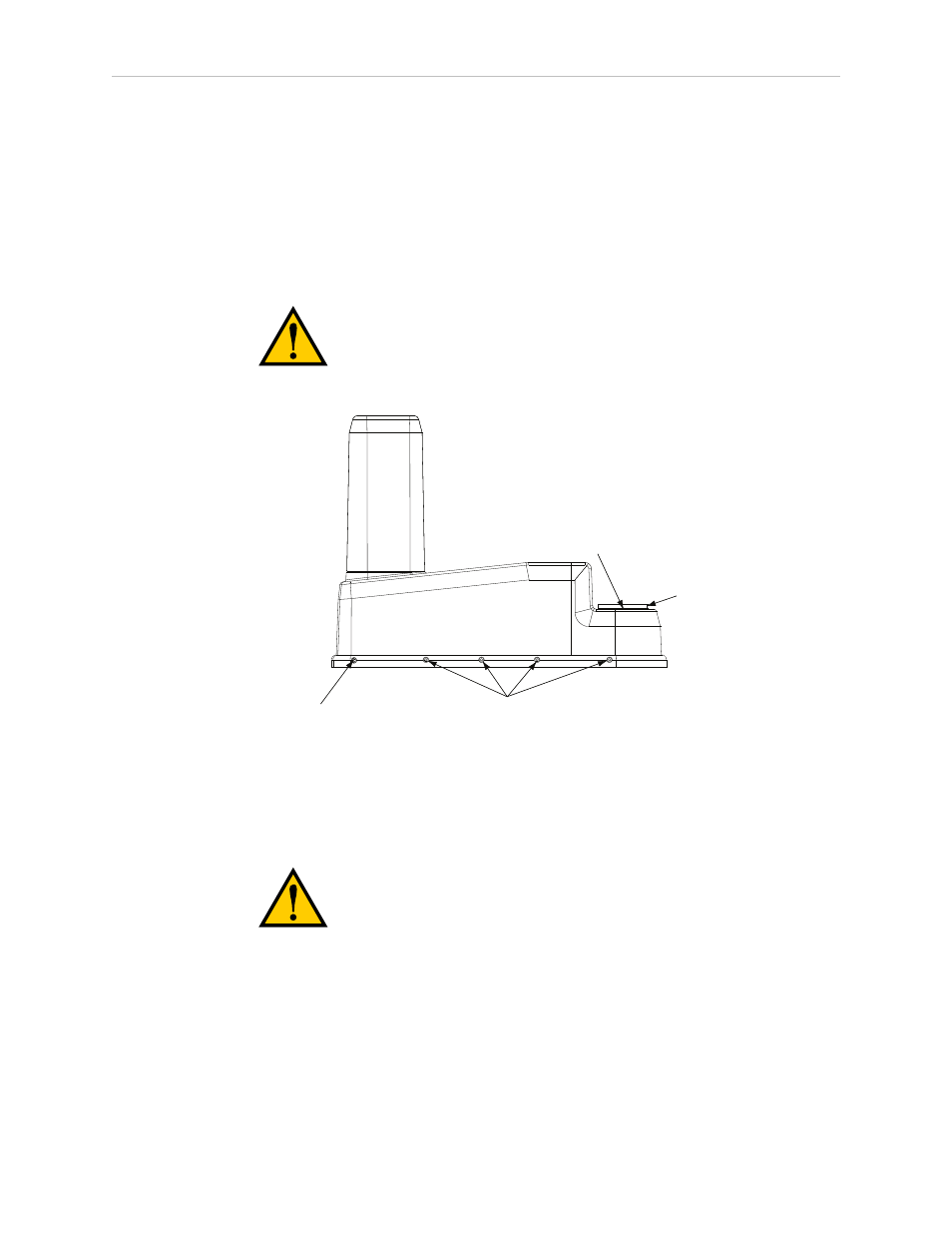
6. Remove the two screws (one on each side) at the front of the outer link.
Make sure the O-ring on each screw stays in place and is not lost.
7. For the 8 screws along the side of the cover (4 on each side; see Figure 9-5), loosen only
1 to 2 turns, just enough to loosen the inside clamp nuts. Do not completely remove the
screws. See the label on the side of the outer link cover.
CAUTION: Do not loosen these screws any more than 2
turns, because the clamp nut on the inside of the cover
might come loose and fall inside the robot.
Two screws, o-rings
(one on each side)
Two screws, nylon washers
(one on each side)
Four screws on each side
Collar
Nut
Figure 9-5. Cover Removal Instructions
8. When all 8 screws are loose (but not removed), lift the cover up and slide it back along
the cable track and out of the way.
WARNING: When the Outer link cover is removed, you
see the label shown in Figure 2-3. Do not remove the J3-
ENC or J4-ENC encoder cable connectors from their
sockets. If they are removed, the calibration data will be
lost and the robot must be run through a factory
calibration process, which requires special software and
tools.
Protect the cover with a soft cloth or other padding material so the cover does not
get scratched—see the following figure.
Adept Cobra s800 Inverted Robot User's Guide, Rev H1
Page 129 of 142