Adept s800 s800 User Manual
Page 115
Chapter 7: Technical Specifications
Description
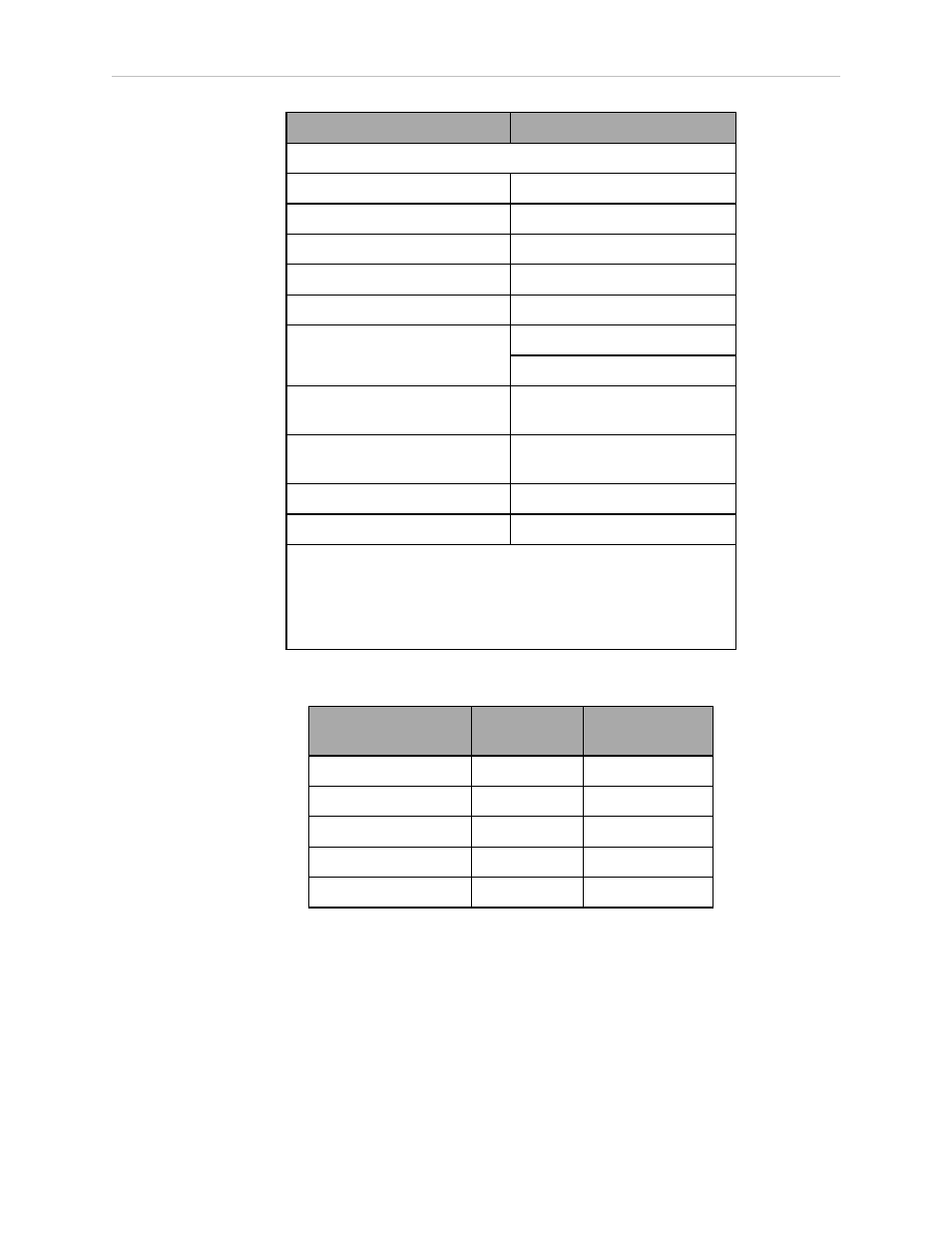
s800 Inverted Robot
Joint Speed (maximum)
Joint 1
386°/sec
Joint 2
720°/sec
Joint 3
1,100 mm/sec (43 in/sec)
Joint 4
1200°/sec
Encoder type
Absolute
Robot Brakes
Joint 1, 2, and 4 Dynamic
Joint 3, Electric
Air line pass-through
(quantity)
6 mm diameter (2)
4 mm diameter (3)
Electrical pass-through
24 conductors
(12 twisted pairs)
DeviceNet pass-through
one available
Weight (without options)
51 kg (112 lb)
b
The robot tool performs continuous path, straight-line
motions 25 mm (1 in.) up, 305 mm (12 in.) over, 25 mm (1 in.)
down, and back along the same path. COARSE is enabled and
BREAKs are used at each end location. Not achievable over all
paths.
Table 7-4. Softstop and Hardstop Specifications
Joint
Softstop
Hardstop
(approximate)
Joint 1
± 123.5
± 127.5
Joint 2
± 156.5
± 160
Joint 2 IP-65 version
± 155
± 158.5
Joint 3
0 to 210 mm
-5 to 215 mm
Joint 4
± 360
not applicable
Adept Cobra s800 Inverted Robot User's Guide, Rev H1
Page 115 of 142