IAI America RCM-101-USB User Manual
Page 191
12. Off Board T
uning Function on SCON-CA
Controller
179
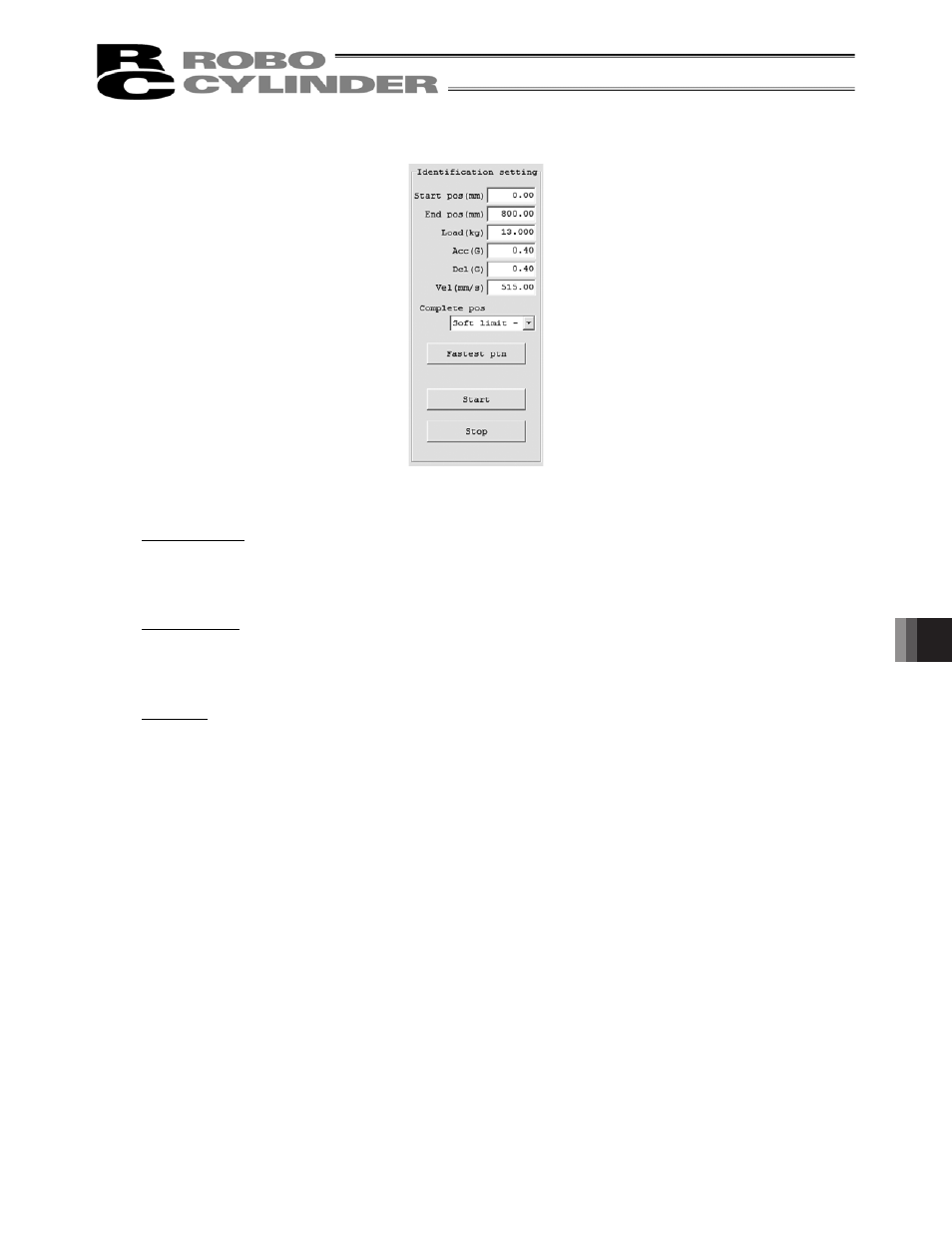
Fig. 12.20 System Identification Setting
Start pos (mm)
The start position for the back and forth operation can be set.
(Note) In the operation for the system identification, the actuator moves back and forth between the start
position and end position.
End pos (mm)
The end position for the back and forth operation can be set.
(Note) In the operation for the system identification, the actuator moves back and forth between the start
position and end position.
Load (kg)
Set the carrier load.
(Note) This is the value used for the system identification calculation and the maximum speed operation
setting.
Set the size of the load roughly even if you do not know the accurate load size.
It is not necessary to change the value from the initial setting if you do not know the load size at
all.
Example) In the case you have the information that the load size is approximately 2 [kg], but you do not
know exactly;
Set “2.000” in Carrier load (kg).