Connections and settings in position control mode – Panasonic MINAS E-series User Manual
Page 91
91
[Connections and Settings in Position Control Mode]
Connections and
Settings in Position
Control Mode
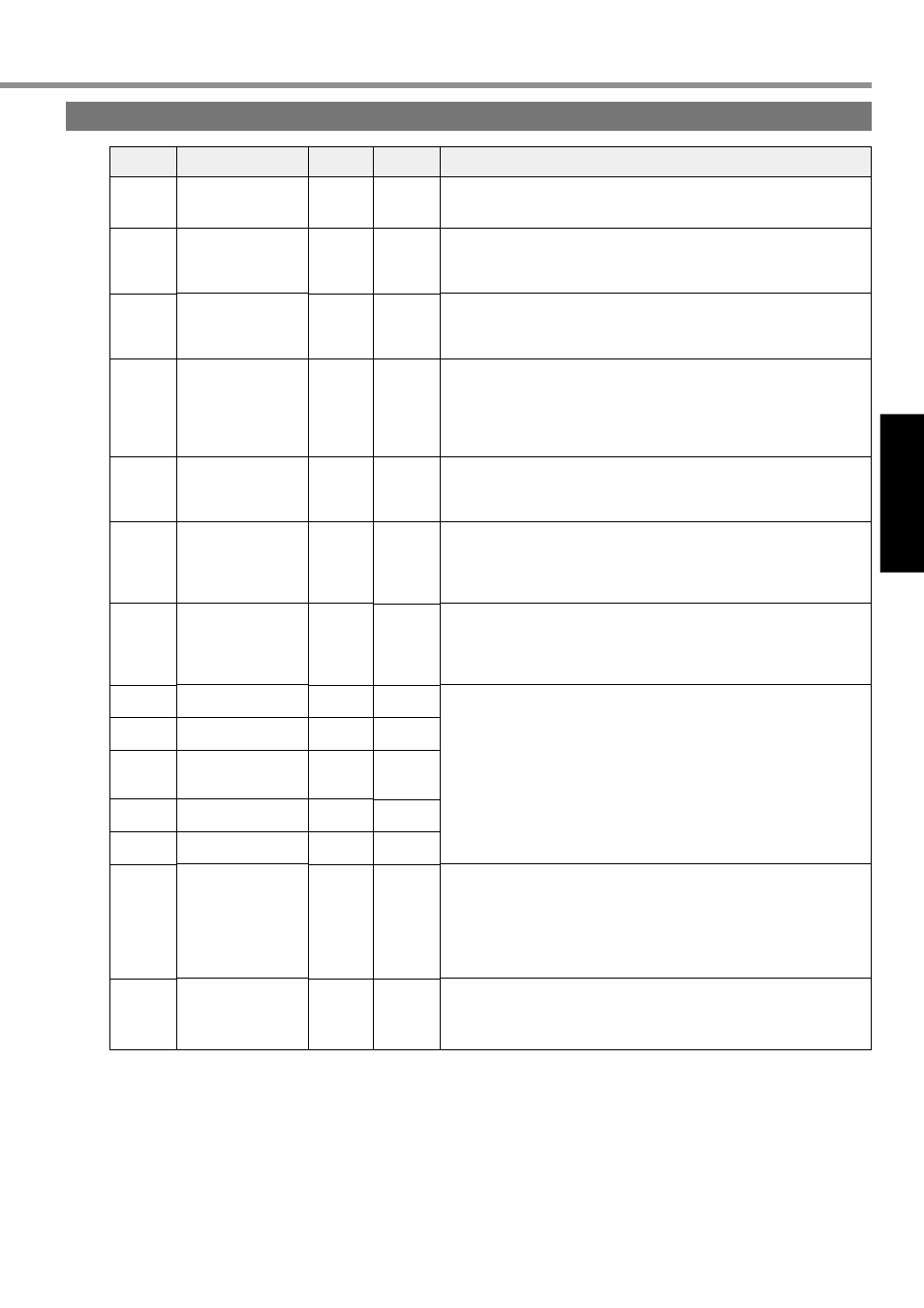
Parameters for Adjustment of Time Constants of Gains/Filters
Parameters having standard default setup value with “*” mark are automatically set while real time auto
gain tuning is running. To change to manual, refer to “Cancellation of the Automatic Gain Tuning” on Page
135 of Adjustment edition, disable real time auto gain tuning and then set.
PrNo.
Parameter Name
Unit
Function/Content
• The parameter determines responsiveness of the position control
system. If you can set a position gain higher, positioning time will be
shorter.
• The parameter determines responsiveness of the velocity loop. To
improve responsiveness of the entire servo system by setting the
position loop gain high, you should be able to set this velocity loop
gain higher.
• This is an integration element provided to velocity loop, and works to
drive minute speed deviation after shutdown to zero. The smaller
setting is, the faster the parameter drives it zero.
• If it is set to “1000”, there will be no effect of integration.
• The parameter is used to set a time constant of the low pass filter
(LPF) entered after the block capable of conversion from an encoder
signal to a speed signal in 6 phases (0 to 5).
• As you increase a setting, the time constant will also rise. Thus,
although you can reduce noise from the motor, we recommend you
set it to 4 or less usually.
• The parameter sets a time constant of the primary delay filter
inserted into torque command unit.
• This might take effect on suppression of vibration due to torsional
resonance.
The parameter sets velocity feed forward volume in position control. If
you set it to 100%, position deviation in operation at given speed will
be almost 0. Although position deviation will be smaller when you set
this higher, and thus responsiveness will be improved, overshoot is
liable to occur more often. Thus, be careful.
• The parameter sets a time constant of the primary delay filter
inserted into the velocity feed forward unit.
• With the feed forward feature included, the filter might improve
speed overshoot/undershoot and thus chattering of positioning
completion signal.
• A position loop, velocity loop, speed detection filter, and torque
command filter have 2 pairs of gains or time constants (1st and
2nd ), respectively.
• The functions/descriptions of respective gains/time constants are
same as the first gain/time constants.
• For details on switching of the 1st/2nd gain, and time constants,
refer to Page 127 of Adjustment edition.
* When Pr20 inertia ratio is set correctly, Pr11 and Pr19 will be set in
(Hz).
• The parameter sets notch frequency of a resonance suppression
notch filter.
• Set the parameter about 10% lower than resonance frequency of the
mechanical system that has been found by the frequency
characteristic analysis feature of “PANATERM
®
, the setup support
software.
• Setting this parameter to “1500” disables functions of the notch filter.
• The parameter sets width of notch frequency of a resonance
suppression notch filter in 5 stages. The higher setting is, the wider
filter width will be.
• Usually, use a default set-up value.
10
11
12
13
14
15
16
18
19
1A
1B
1C
1D
1E
1st position loop
gain
1st velocity loop
gain
1st velocity loop
integration time
constant
1st speed
detection filter
1st torque filter
time constant
Velocity feed
forward
Feed forward filter
time constant
2nd position loop
gain
2nd velocity loop
gain
2nd velocity loop
integration time
constant
2nd speed
detection filter
2nd torque filter
time constant
1st notch
frequency
1st notch width
selection
0 - 32767
[63]*
1 - 3500
[35]*
1 - 1000
[16]*
0 - 5
[0]*
0 - 2500
[65]*
–2000 -
2000
[300]*
0 - 6400
[50]*
0 - 32767
[73]*
1 - 3500
[35]*
1 - 1000
[1000]*
0 - 5
[0]*
0 - 2500
[65]*
100 -
1500
[1500]
0 - 4
[2]
1/s
Hz
ms
–
0.01ms
0.1%
0.01ms
1/s
Hz
ms
–
0.01ms
Hz
–
Range of
Settings