Connections and settings in position control mode, Parameters input signal status, Gear – Panasonic MINAS E-series User Manual
Page 83
83
[Connections and Settings in Position Control Mode]
Connections and
Settings in Position
Control Mode
Parameters
Input Signal Status
• Use the host controller to send command pulses.
PrNo.
Pr02
Pr04
Pr42
Parameter Name
Control mode set up
Overtravel input inhibit
Command pmulse input mode set up
Settings
2
1
1
Signal No.
00
02
03
0A
Input Signal Name
Servo-ON
CW overtravel inhibit
CCW overtravel inhibit
Counter clear
Monitor Display
+A
–
–
–
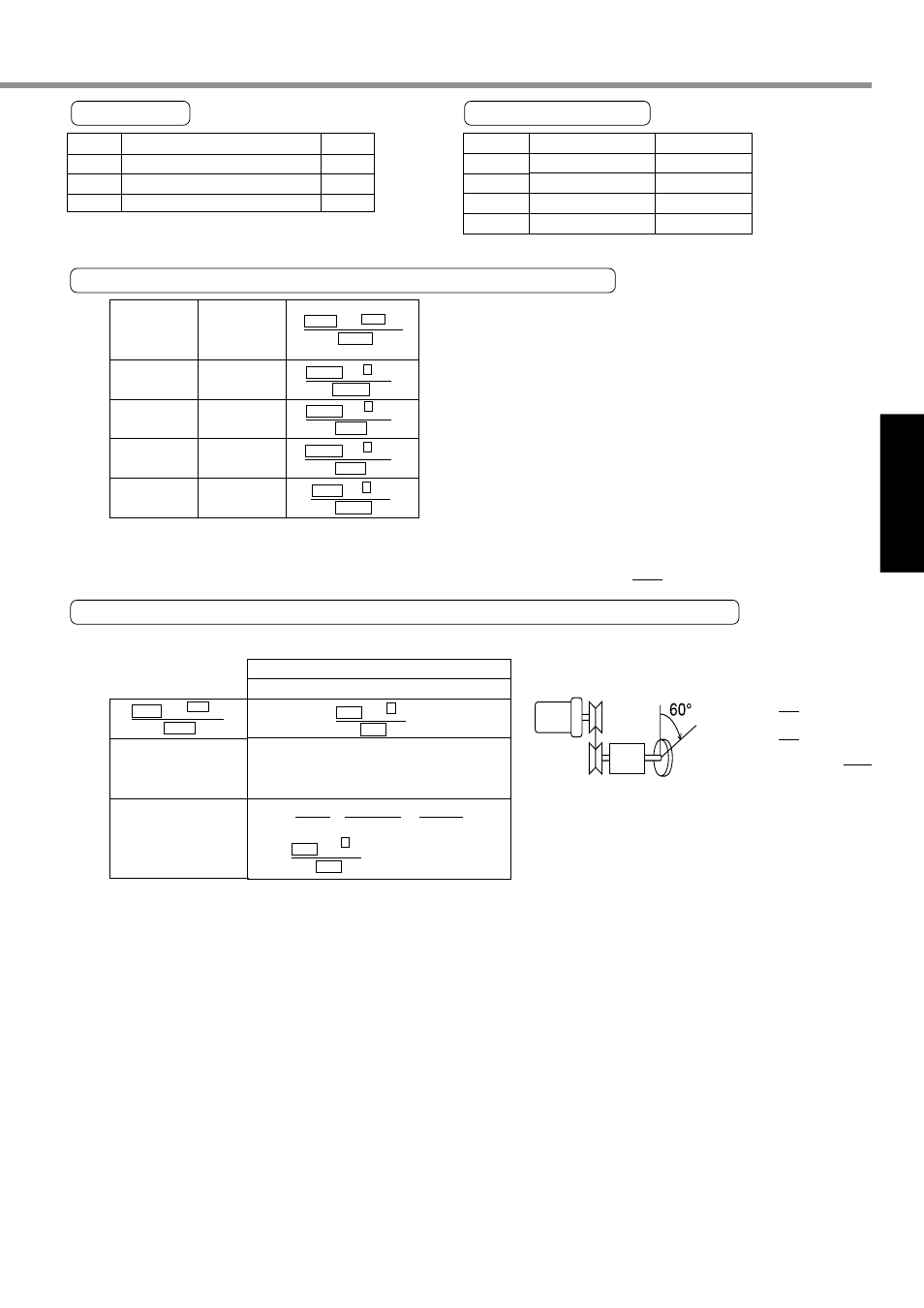
Setting of Motor Rotation Speed and Input Pulse Frequency
Input pulse
frequency
(pps)
500k
250k
100k
500k
Motor
rotation
speed (r/min)
3000
3000
3000
1500
←
←
←
←
←
Defaul Setup
* Our default setup is “the motor shaft rotates once at
10000 pulse input”. Note that the maximum input pulse
frequency is 500 kpps for a line driver and 200 kpps for
an open collector.
(Example 1) Rotate the motor at 60 degrees with overall deceleration ratio of 18/365.
* Also refer to “Description on Dividing/Multiplier
Ratio” on Page 178 of Reference edition.
* You can set any value depending on a numerator and denominator setting. However, if you specify
an extreme dividing/multiplier ratio, we cannot guarantee proper operation of the motor. We
recommend that you set the dividing/multiplier ratio in the range of to 20 times.
1
50
Theory
Determination of the
parameter
Encoder Pulse
2500P/r
From your controller to the driver, enter
command that the motor rotates 60
degrees with 10000 pulses.
365
x 2
108
0
365
18
10000
10000
60˚
360˚
x
Gear
18
60
Pulley Ratio:
Gear ratio:
Overall deceleration ratio:
12
73
18
365
Relationship between Motor Angle of Rotation and Input Pulse Frequency
365
x 2
108
=
0
x
Pr 46
x 2
Pr 4B
Pr 4A
10000
x 2
10000
0
5000
x 2
10000
0
10000
x 2
2000
0
10000
x 2
5000
0
Pr46
x 2
Pr4B
Pr4A