Manual gain tuning (application), Gain switching function, Setting gain switching conditions – Panasonic MINAS E-series User Manual
Page 138
138
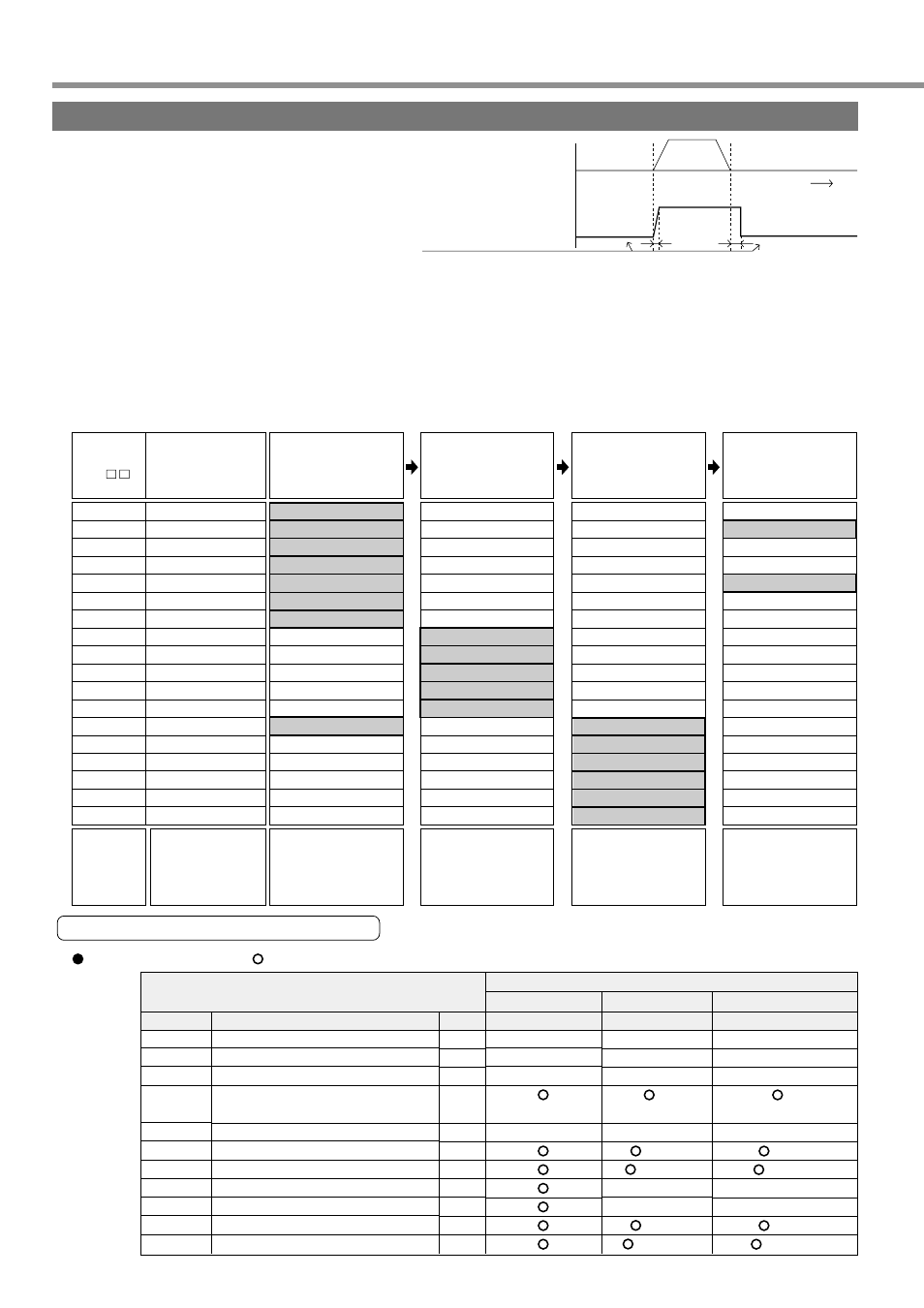
Setting Gain Switching Conditions
Position Control Mode : Applicable parameters are enabled –: Disabled
Manual Gain Tuning (Application)
Set parameters in position mode
Figure
A
C
D
E
F
A
G
Switching conditions
Fixed to the 1st gain
Fixed to the 2nd gain
Gain switching input. 2nd gain when GAIN turns on
Torque command 2nd gain when
there is much variation
Fixed to the 1st gain
Velocity command
Position deviation
Position command
Positioning not completed
Motor real speed
Command + speed
Delay time
*1
Pr32
–
–
–
–
Level
Pr33
–
–
–
*3
[0.05%/166 ms]
–
[r/min]
*4[pulse]
–
–
[r/min]
[r/min] *5
Hysteresis
*2
Pr34
–
–
–
*3
[0.05%/166 ms]
–
[r/min]
*4[pulse]
–
–
[r/min]
[r/min] *5
Pr31
0
1
2
3
4
5
6
7
8
9
10
Setting of gain switching conditions
Gain Switching Function
In manual gain switching mode, you can
manually set a second gain in addition to a 1st
gain, and execute gain switching depending on
an operating state.
• When you wish to accelerate responsiveness
by increasing gain during operations
• When you wish to improve stiffness of servo lock by increasing gain in halt condition
• When you wish to switch to optimal gain, depending on an operation mode
• When you wish to decrease gain to suppress vibration under suspension
You can use the function of switching from a 1st to 2nd gain for various applications.
This is an example of when you’ve noticed sound when the motor is halted (servo lock) or when you
reduce noise by switching to low gain setting after the motor is stopped.
Operation
State
Gain
Suppress vibration
by reducing gain
Stopped
(servo lock)
Low gain
(1st gain)
Low gain
(1st gain)
High gain
(2nd gain)
1ms
2ms
Stopped
(servo lock)
Drive
Time
Command speed
Parameter Name
Pr10
Pr11
Pr12
Pr13
Pr14
Pr15
Pr16
Pr18
Pr19
Pr1A
Pr1B
Pr1C
Pr30
Pr31
Pr32
Pr33
Pr34
Pr35
63
35
16
0
65
300
50
0
63
35
16
0
65
1
7
30
0
0
0
27
84
1st position loop gain
1st velocity loop gain
1st velocity loop
integration time constant
1st speed detection filter
1st torque filter time constant
2nd position loop gain
2nd velocity loop gain
2nd velocity loop
integration time constant
2nd speed detection filter
2nd torque filter time constant
2nd gain action set-up
Position control switching mode
Pr20
Inertia ratio
Execute manual gain
tuning without gain
switching.
• Enter a numeric value when it
is known by load calculation,
etc.
• Execute normal auto tuning to
measure inertia ratio.
• A default is 100.
Set Pr18 to Pr1C
(2nd gain) to a same
value as Pr10 to Pr
14 (1st gain).
Set Pr30 to Pr35
(gain switching
conditions).
Adjust Pr11 and Pr14
in halt condition (1st
gain).
Parameter No.
(Pr )