Setting the parameters, Parameters for positioning control, Parameters for velocity control and torque limit – Panasonic MINAS E-series User Manual
Page 44
44
Setting the Parameters
—
–20000 - 20000
–20000 - 20000
–20000 - 20000
–20000 - 20000
0 - 500
0 - 5000
0 - 5000
—
0 - 500
—
50 - 52
53
54
55
56
57
58
59
5A - 5D
5E
*1
5F
(For manufacturer use)
1st internal speed set-up
2nd internal speed set-up
3rd internal speed set-up
4th internal speed set-up
JOG internal speed set-up
Acceleration time set-up
Deceleration time set-up
(For manufacturer use)
1st torque limit set-up
(For manufacturer use)
Parameter No.
Parameter description
Range
Default
Unit
Related control mode
(Pr )
Command pulse multiplier set-up
Command pulse direction of rotation set-up
Command pulse input mode set-up
(For manufacturer use)
Output pulses per single turn
Pulse output logic inversion
Numerator of 1st command pulse ratio
Numerator of 2nd command pulse ratio
(For manufacturer use)
Multiplier of numerator of command pulse ratio
Denominator of command pulse ratio
Smoothing filter set-up
(For manufacturer use)
FIR filter set-up
(For manufacturer use)
1 - 4
0 - 3
0 - 3
—
1 - 16384
0 - 1
1 - 10000
1 - 10000
—
0 - 17
1 - 10000
0 - 7
—
0 - 31
—
4
0
1
0
2500
0
10000
10000
0
0
10000
1
0
0
0
—
—
—
—
P/r
—
—
—
—
2
n
—
—
—
(Setup value + 1)
cycles
—
P • P2
P • P2
P • P2
—
P • P2 • S
P • P2 • S
P • P2
P • P2
—
P • P2
P • P2
P • P2
—
P • P2
—
*40
*41
*42
43
*44
*45
46
47
48,49
4A
4B
4C
4D
*4E
4F
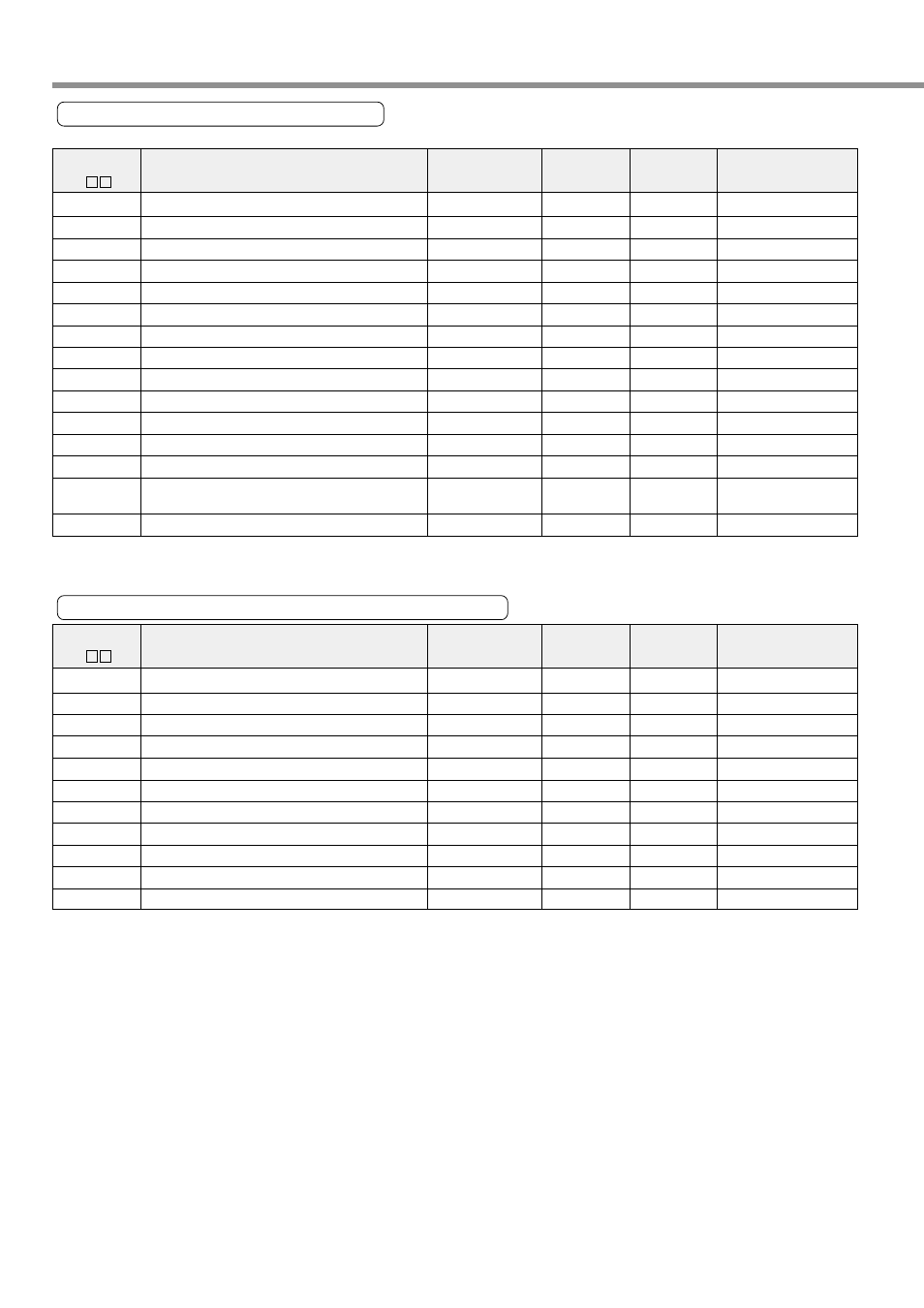
Parameters for Positioning Control
Parameter No.
Parameter description
Range
Default
Unit
Related control mode
(Pr )
0
0
0
0
0
300
0
0
0
See next page
0
—
r/min
r/min
r/min
r/min
r/min
2ms/(1000r/min)
2ms/(1000r/min)
—
%
—
—
S
S
S
S
P • P2 • S
S
S
—
P • P2 • S
—
Parameters for Velocity Control and Torque Limit
• *-marked parameter No. in the above table is validated by writing the parameter No. in EEPROM after set
up and re-switching ON the power after once switched OFF.
*1 : Each standard default setup value in Pr5E differs depending on combination of driver and motor. Refer
to “Pr5E 1st Torque Limit Set-up” on next page, too.
P: High velocity response positioning control, P2: High function positioning control, S: Internal velocity control