Trouble case, Original position varies, The motor has abnormal sound or vibration – Panasonic MINAS E-series User Manual
Page 153
153
[Trouble Case]
T
rouble Case
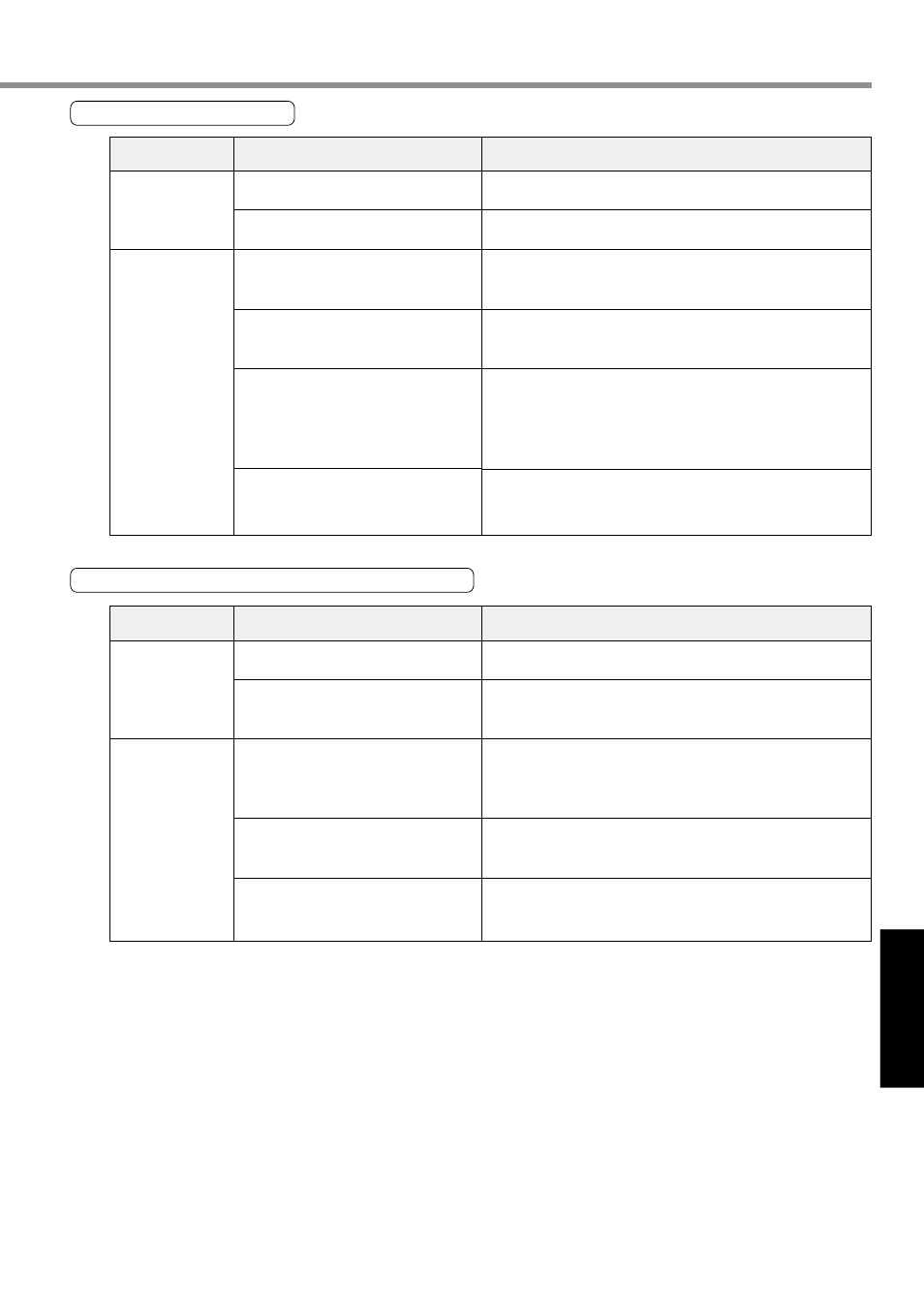
Original position varies
Category
System
Wiring
Cause
Phase Z is not detected when the
original position is calculated.
Speed to creep to the original position
is fast.
Output of the original point proximity
sensor (nearest point dog sensor) is
chattering.
Noise is superposed on the encoder
wire.
Phase Z signal is not output.
Wiring of phase Z output is incorrect.
Action
Check if phase Z is superposed on proximity input (nearest
point dog sensor). Initialize correctly according to the controller.
Decelerate the initialization speed in the vicinity of the original
position, or extend the initialization sensor.
Using an oscilloscope, check input signal of the nearest point
dog sensor of the controller. Review wiring around the nearest
point dog and take action to reduce and prevent noise.
Take various actions: Reduce noise (by installing a noise filter/
inserting ferrite cores), shield I/F cable, use twist pair cable,
separate signal line from power line, etc.
Using an oscilloscope, monitor phase Z signal to be entered
into the controller. Check that the connector CN X5 pin 14 is
connected to the ground of the controller. For non-isolated
open collector interface, connect the ground of the driver.
Replace the driver and controller. Ask for repair.
Check that the line driver is connected at both sides. If the
controller does not have a differential input, use CZ output
(open collector).
The motor has abnormal sound or vibration
Category
Adjustment
Installation
Cause
The gains are set high.
A speed detection filter has changed.
Resonance between the equipment
(machine) and the motor is generated.
Motor bearing
Electromagnetic sound, gear sound,
braking sound, hub sound, rubbing
sound from the encoder etc.
Action
Decrease the values of the position loop gain Pr10 and velocity
loop gain Pr11 to lower the gains.
Increase the value of the speed detection filter Pr13 until the sound
reaches the allowable level, or reset it to a default setup of 4.
Readjust Pr14 (torque filter). Using the frequency characteristic
analysis program of the PANATERM
®
, check whether there is
any mechanical resonance. If so, set the notch frequency
Pr1D.
Drive the motor with no load to see if there is any sound or
vibration around the bearing. Replace the motor and check.
Ask for repair.
Drive the motor with no load and check. Replace the motor and
check. Ask for repair.