Parameters for position control – Panasonic MINAS E-series User Manual
Page 121
121
[Connections and Settings in Internal Velocity Control Mode]
Connections and
Settings in Internal
V
e
locity Control Mode
PrNo.
Parameter Name
Function/Content
The parameter sets the number of pulses per rotation of the encoder pulse to be
output to the host. Pulse should be set with dividing.
Directly set the number of pulses per rotation, in [Pulse/rev], necessary for a
device/system on your side.
Any value that exceeds the encoder pulse will be disabled.
A phase relation of output pulses from the rotary encoder is as follows: Phase B
pulse is behind Phase A pulse during rotation in CW direction (Phase B pulse is
ahead of Phase A pulse during rotation in CCW direction).
44
45
Output pulses per
single turn
Pulse output logic
inversion
1 - 16384
[2500]
0 - 1
Parameters for Position Control
Standard Default Setup: [ ]
Parameters having standard default setup value with “*” mark are automatically set while real time auto
gain tuning is running. To change to manual, refer to “Cancellation of the Automatic Gain Tuning” on Page
135 of Adjustment edition, disable real time auto gain tuning and then set.
Range of
Settings
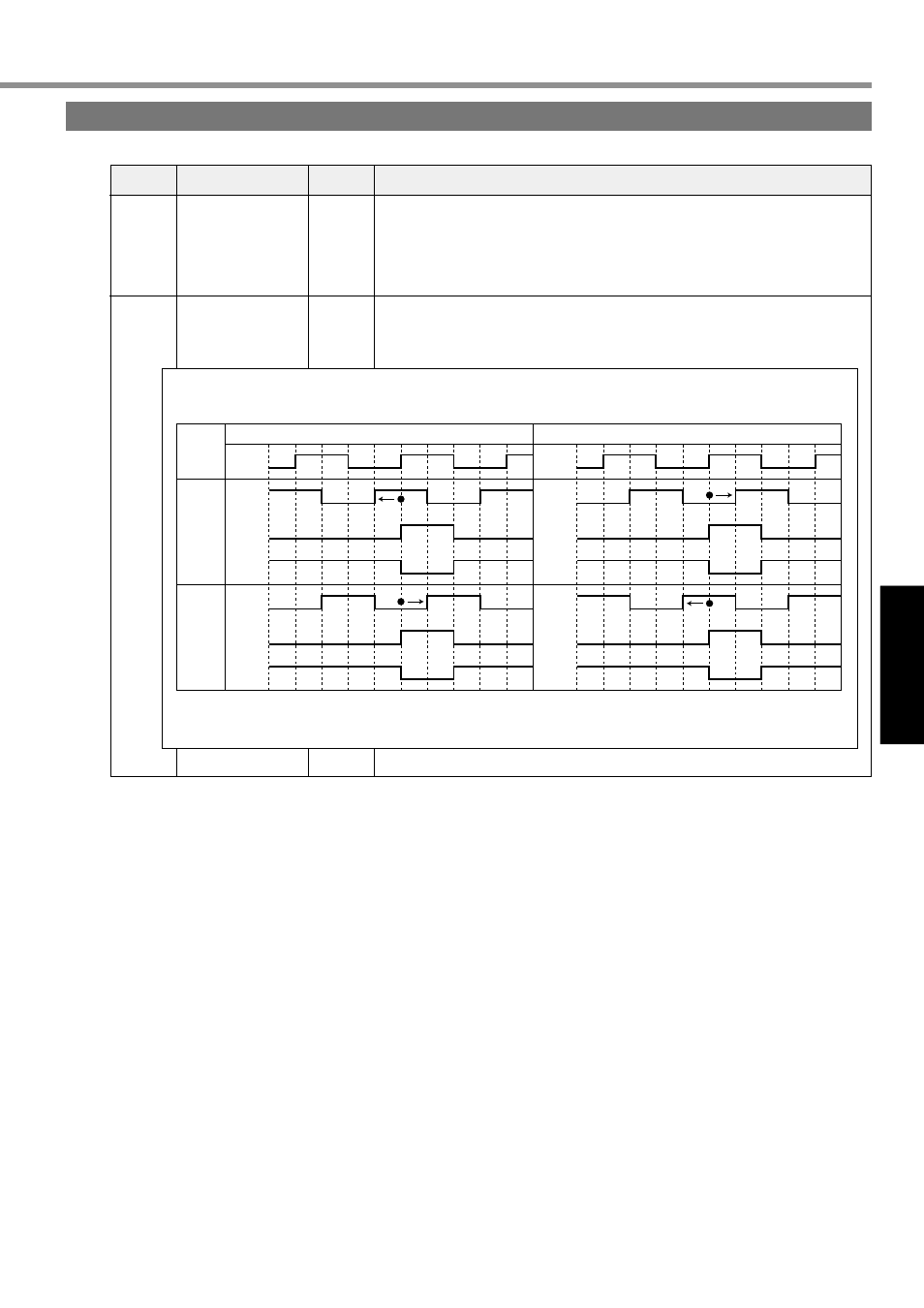
Reversing logic of Phase B pulse with this parameter, you can reverse the phase relation of Phase B to Phase
A.
When the motor is rotating in CCW direction
When the motor is rotating in CW direction
Settings
Phase A
(OA)
Phase B
(OB)
Phase Z
(OZ)
CZ
Phase B
(OB)
Phase Z
(OZ)
CZ
Phase A
(OA)
Phase B
(OB)
Phase Z
(OZ)
CZ
Phase B
(OB)
Phase Z
(OZ)
CZ
[0]
Phase B
Noninverted
1
Phase B
Inverted
Phase Z is in sync with Phase A. You cannot reverse Phase Z.
Even by dividing, Phase Z outputs 1 pulse per rotation.
O n
O n
O n
O n