Normal auto gain tuning, Outline, Scope – Panasonic MINAS E-series User Manual
Page 132: Cautions, Auto gain tuning operation
132
Normal Auto Gain Tuning
Outline
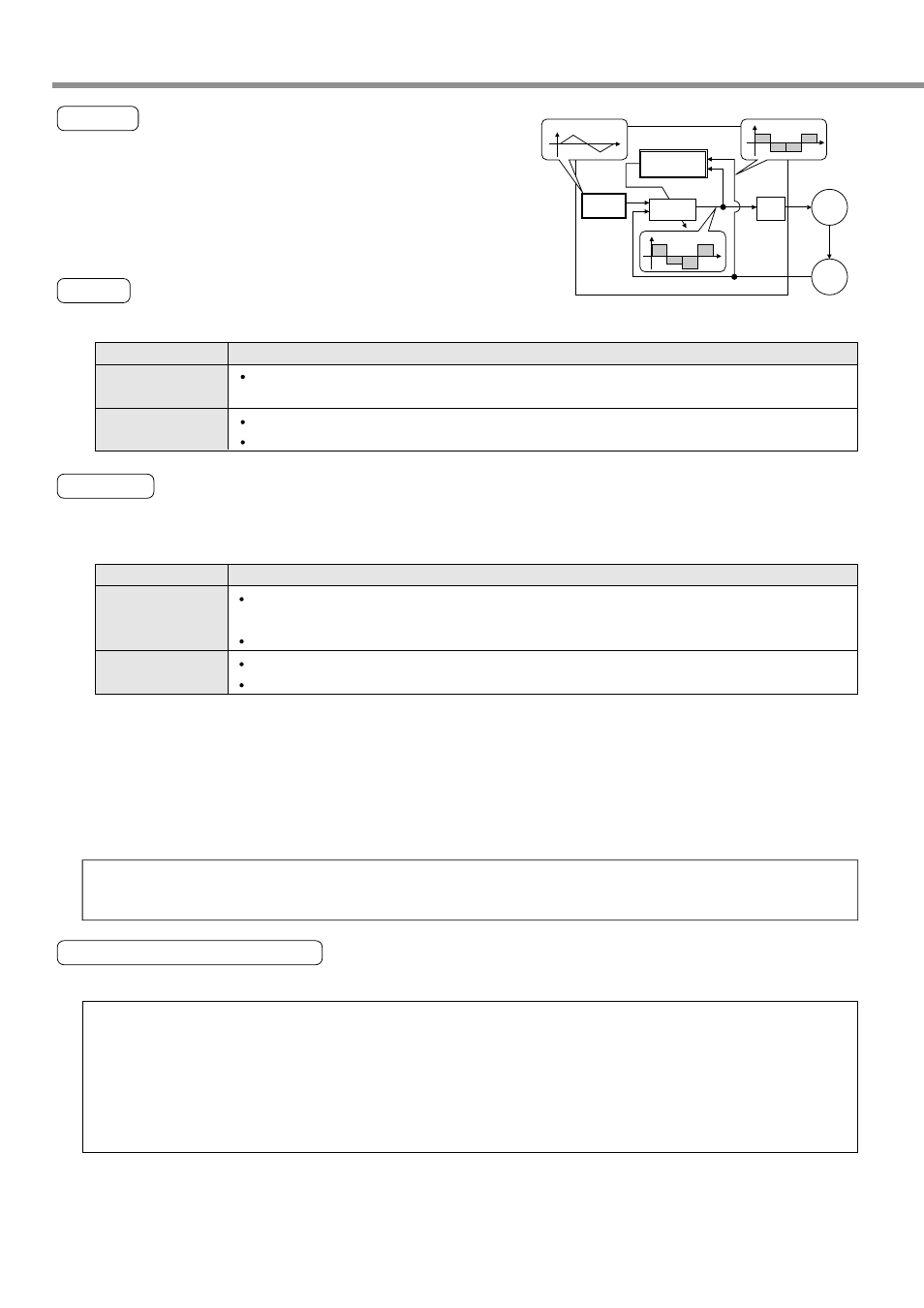
In normal auto gain tuning, the motor runs at a command pattern
automatically generated by the driver, load inertia is estimated
based on the torque required then, and thus appropriate gain is
automatically set.
Scope
This feature functions under the following conditions:
Cautions
Under the following conditions, normal auto gain tuning may not function properly. In such cases, set the manual
gain tuning.
• If abnormal Servo-OFF/deviation counter clear occurs during auto gain tuning operation, tuning error will be
generated.
• If load inertia cannot be estimated even though auto gain tuning has been executed, gain will remain un-
changed, namely, same as a value prior to tuning.
• Motor output torque during auto gain tuning operation may be allowed up to output torque set with Pr5E
(torque limit set-up), while CW and CCW overtravel inhibit will be ignored.
Pay adequate attention to safety. In case of oscillation, promptly cut off the power or turn on
Servo-OFF and reset gain to default setup through setting of parameters.
Position command
Motor torque
Servo driver
Motor acceleration
Estimation of
load inertia
Current
control
Motor
current
Motor
speed
Position/
velocity control
Automatic
gain tuning Torque
command
Motor
Encoder
Normal mode auto
gain tuning
Generation of an
internal position
command
Control mode
Input signal
Conditions under which normal auto gain tuning works
Pr02=0 (high speed response positioning control), Pr02=2 (high function positioning control), and
Pr02=1 (internal velocity control) They can be used in all control modes.
It should be in Servo-ON state.
No deviation counter clear signal has been entered.
Load inertia
Load
Conditions that hinder operation of normal auto gain tuning
When it is smaller or greater than rotor inertia
(less than 3 times, or more than 30 times)
When load inertia is fluctuated.
When mechanical stiffness is extremely low.
When there is backlash or play, etc.
Auto Gain Tuning Operation
(1) In normal auto tuning, responsiveness is set in terms of mechanical stiffness No.
Mechanical Stiffness No.
• The number sets level of mechanical stiffness of a user machine and is represented by a value from 0 to
15.
The higher mechanical stiffness a machine has, the higher you can increase this number and set gain.
• Usually, set stiffness No. in ascending order and execute auto gain tuning. Use the function as far as
oscillation/abnormal noise/vibration does not occur.
(2) An operating pattern you set with Pr25 (normal auto tuning motion set-up) is repeated up to 5 cycles. In
addition, acceleration of operation is doubled for every cycle after a third cycle. Depending on load state, the
operating pattern may end without being repeated 5 cycles, or acceleration of operation may not rise. This,
however, does not constitute abnormality.