Gain adjustment, Adaptive filter, Cautions – Panasonic MINAS E-series User Manual
Page 131: Parameters to be set automatically
131
[Gain Adjustment]
Gain Adjustment
Adaptive Filter
Filters are effective when Pr02=2 (high-grade position control mode) and Pr21 is 1 to 3 or 7.
The adaptive filter reduces the resonance point vibration, by estimating resonance frequency from the vibration
component that appears at the motor operation, and removes the resonance component by torque command
through automatic setting of a coefficient of a notch filter.
The adaptive filter may not function normally under the following conditions. In such cases, use the anti-resonance
measures of 1st notch filter (Pr1D, 1E) according to the manual tuning procedure.
For details of the notch filter, refer to “To Reduce Mechanical Resonance” in Page 140.
Cautions
(1) After startup, immediately following the first Servo-ON or when you increase Pr22 (auto tuning), you may have
abnormal noise or oscillation before you identify load inertia or an adaptive filter is stabilized. However, this
doesn’t constitute abnormality if it disappears in no time. If oscillation or noise persists over 3 reciprocating
operations, you should take any of the following measures in any possible order:
1) Write into EEPROM parameters used during normal operation.
2) Decrease Pr22 (auto tuning).
3) Once set Pr21 (real time auto tuning mode setting) to 0 and disable an adaptive filter. Then, enable real time
auto tuning again (To disable inertia estimation/resetting of adaptive operation, or real time auto tuning, refer
to “Cancellation of the Automatic Gain Tuning” on Page 135).
4) Manually set a notch filter (Refer to “To Reduce Mechanical Resonance” on Page 140).
(2) In some cases, after abnormal noise or oscillation is generated, Pr20 (inertia ratio) or Pr2F (adaptive filter
frequency) may change to an extreme value. In such cases, you should take the measures described above.
(3) Among results of real time auto gain tuning, Pr20 (inertia ratio) and Pr2F (adaptive filter frequency) are written
into EEPROM every 30 minutes. When you power up again, auto tuning will be carried out using the data as an
initial value.
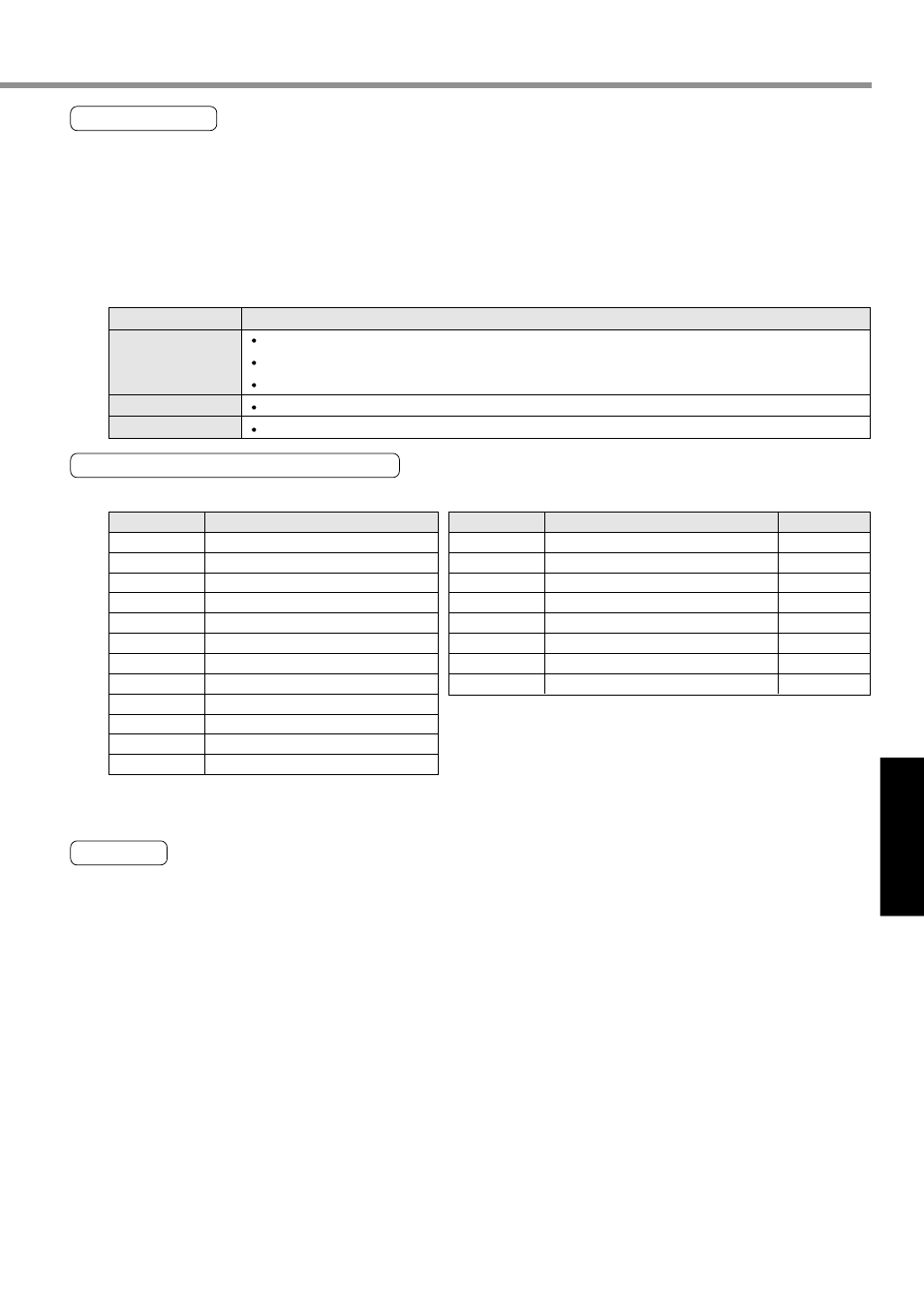
PrNo.
10
11
12
13
14
18
19
1A
1B
1C
20
2F
Name
1st position loop gain
1st velocity loop gain
1st velocity loop integration time constant
1st speed detection filter
1st torque filter time constant
2nd position loop gain
2nd velocity loop gain
2nd velocity loop integration time constant
2nd speed detection filter
2nd torque filter time constant
Inertia ratio
Adaptive filter frequency
PrNo.
15
16
30
31
32
33
34
35
300
50
1
10
30
50
33
20
Name
Setting
Velocity feed forward
Feed forward filter time constant
2nd gain action set-up
Position control switching mode
Position control switching delay time
Position control switching level
Position control switching hysteresis
Position loop gain switching time
Parameters to be Set Automatically
The following parameters are tuned automatically. The following parameters are also set up to the following fixed values automatically.
Resonance Point
Command Pattern
Load
Conditions that Hinder an Adaptive Filter from Functioning
When the resonance frequency is 300 [Hz] or lower.
When resonance peak or control gain is low, which does not affect the motor speed
When there is more than one resonance point
When the motor speed having high frequency component fluctuates due to nonlinear element such as backlash, etc.
When acceleration or deceleration is exponential such as 30000 [r/min] or more in 1 [s]
When real time auto tuning is in effect, you are not allowed to change any parameter to be automatically tuned.