Preparations, Parameters for adjustment for 2nd gain – Panasonic MINAS E-series User Manual
Page 43
43
[Preparations]
Preparations
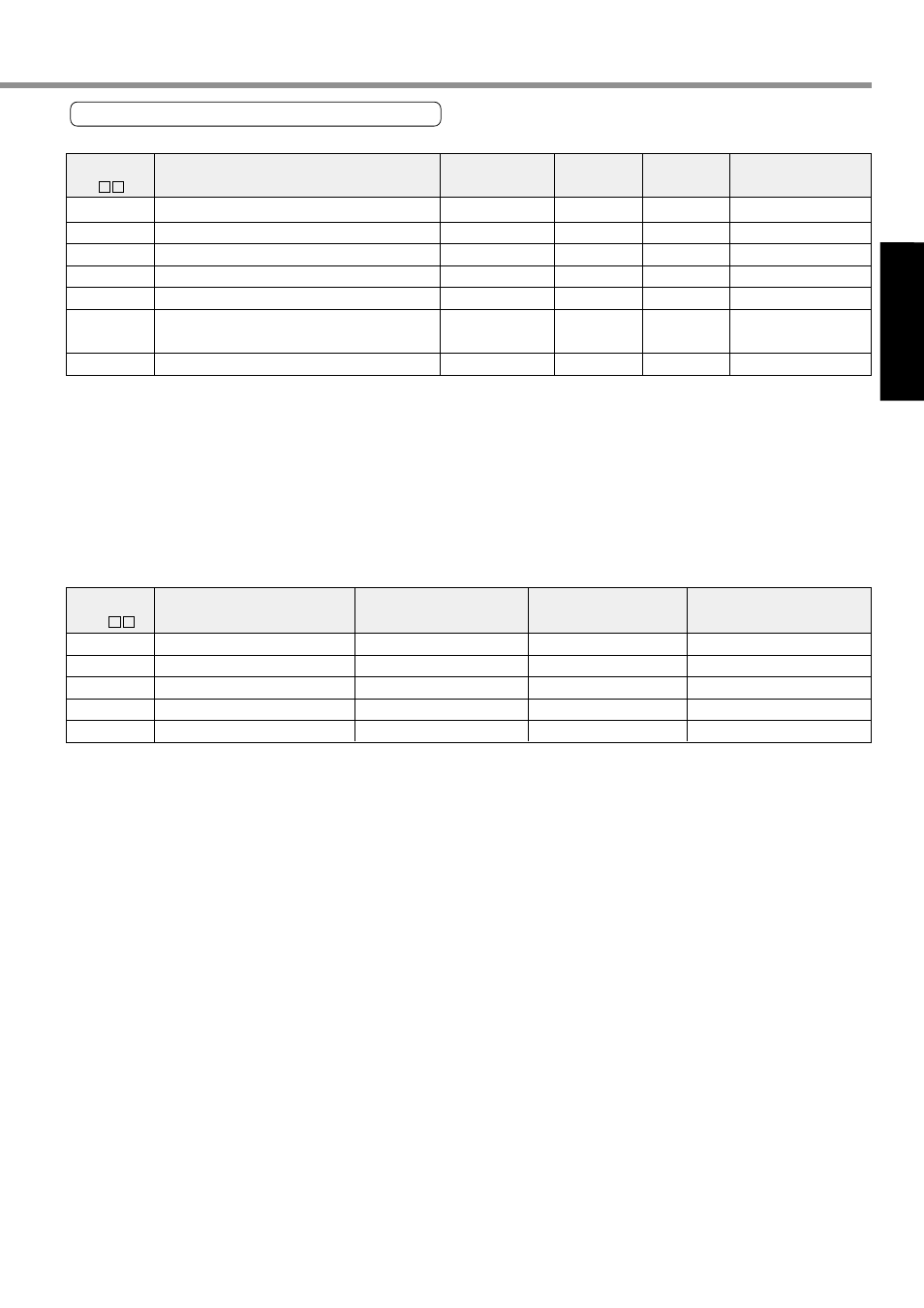
Parameter No.
Parameter description
Range
Default
Unit
Related control mode
(Pr )
2nd gain action set-up
Position control switching mode
Position control switching delay time
Position control switching level
Position control switching hysteresis
Position loop gain switching time
(For manufacturer use)
0 - 1
0 - 10
0 - 10000
0 - 20000
0 - 20000
0 - 10000
—
<1>
<10>
<30>
<50>
<33>
<20>
0
—
—
166
µs
—
—
Setup value
× 166µs
—
P • P2
P • P2
P • P2
P • P2
P • P2
P • P2
—
30
31
32
33
34
35
36 - 3F
Parameters for Adjustment for 2nd Gain
• The parameters which of “standard default value” is enclosed with < > vary automatically with execution
of the real time auto tuning function. For adjusting in MANUAL mode, set Pr21 real time auto tuning set-
up to “0” (invalidated).
*1
*2
In “High Velocity Response Positioning Control” and “Internal Velocity Control” modes, simultaneous use of the
first notch frequency, damping frequency and real time auto tuning set-up is not allowed, and any one of
parameters (functions) can only be used. By priority a parameter that is entered first will be validated.
(Ex.) By setting “Real time auto tuning“ parameter, 1st notch frequency is set compulsorily to 1500
(Invalidated) at the driver side even it was input.
*3
An adaptive filter is only validated in high function positioning control mode.
Control mode set-up
1st notch frequency
Damping frequency
Real time auto tuning set-up
Adaptive filter frequency
02
1D
2B
21
2F
1
Conditional *2
Invalidated
Conditional *2
Invalidated
2
Validated
Validated
Validated
Validated *3
0
Conditional *2
Conditional *2
Conditional *2
Invalidated
High velocity response
positioning control: P
High function
positioning control: P2
Internal Velocity Control: S
• *-marked parameter No. in the above table is validated by writing the parameter No. in EEPROM after set
up and re-switching ON the power after once switched OFF.
P: High velocity response positioning control, P2: High function positioning control, S: Internal velocity control
Parameter No.
(Pr )
Parameter description