Parameter setting – Panasonic MINAS E-series User Manual
Page 100
100
Parameter Setting
PrNo.
Parameter Name
Function/Content
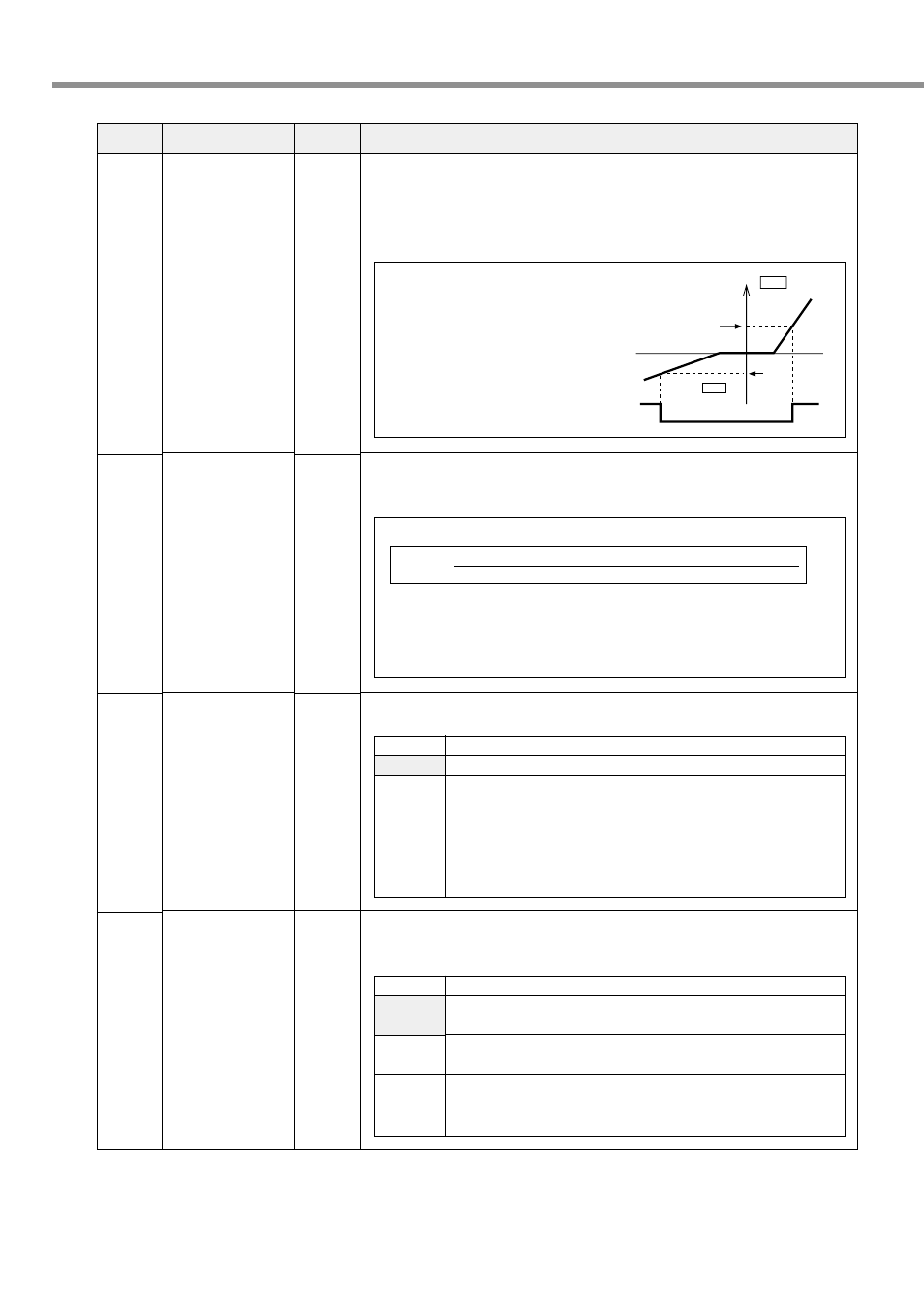
• The parameter directly sets in [r/min] timing to output zero speed detection
output signal (WARN: CN X5 pin 12).
You need to set parameter warning output selection (Pr09) to 1.
• The zero speed detection signal (WARN) will be output when the motor speed
falls below the set speed of this parameter Pr61.
• The parameter sets a detection level for determining excessive deviation of
“protection against excessive position deviation” feature, by using the number
of retained pulses of the deviation counter.
This parameter can disable the “protection against excessive position deviation”
function.
The parameter sets the deceleration and stop operation after the overtravel inhibit
input (CCWL: Connector CNx58 pin or CWL: Connector CNx57 pin) activates and
becomes enabled.
61
63
64
66
Zero speed
1st position over-
deviation set-up
Position over-
deviation
invalidation
Deceleration and
stop set-up at
overtravel inhibit
0 -
20000
[50]
0 -
32767
[1875]
0 - 1
0 - 2
• Setting of Pr61 acts on both CW and
CCW directions, irrespective of the
direction of motor rotation.
• There is hysteresis of 10 rpm. Set the
parameter 10 or more.
Speed
CW
WARN
ON
Pr61
Pr61
CCW
Driving Conditions from Deceleration to Stop
Invalidate torque in the overtravel inhibit direction, and activate
the dynamic brake.
Invalidate torque in the overtravel inhibit direction, and have the
motor free run.
In the position control mode, servo lock is decelerated and
stopped, and in the internal velocity control mode, speed zero
clamp deceleration and stop is actuated.
Setting
[0]
1
2
• Calculate setting according to the expression shown below:
Setting =
Level for Determining Excessive Position Deviation [PULSE]
256
Be careful because the protection against excessive position deviation may
work although there is no abnormality, in particular, when you not only set
position gain low but also set Pr63 low.
Standard Default Setup: [ ]
Range of
Settings
Setting
[0]
1
Protection against excessive position deviation
Enabled
Disabled. The operation continues without causing abnormality
even when retained pulse exceeds the level for judgment set with
Pr63.
Runaway may occur if you make a mistake in the sequence of
phases of the motor or wiring of the encoder. Install a failsafe in
the device to prevent runaway.