Protective functions – Panasonic MINAS E-series User Manual
Page 154
154
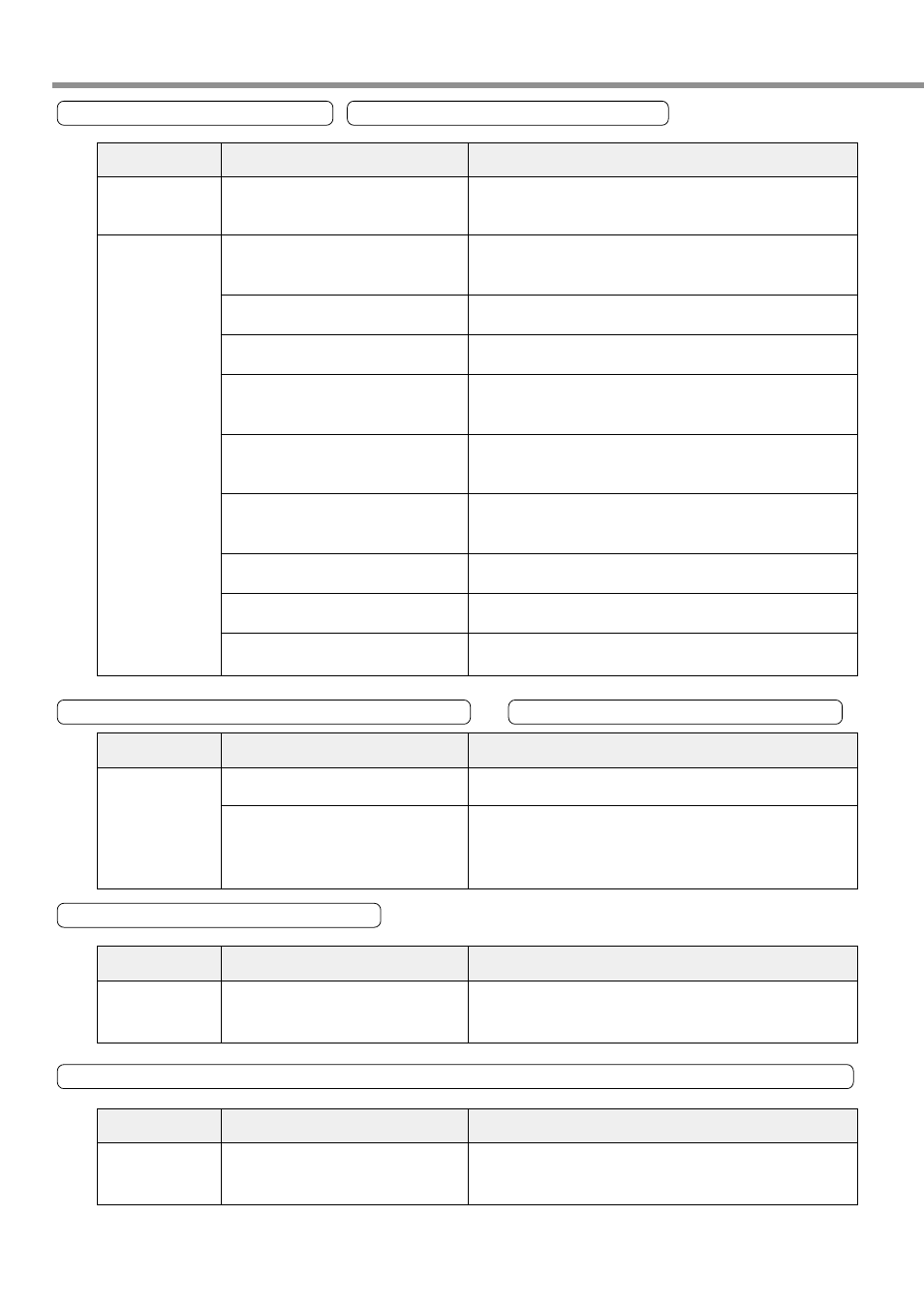
Protective Functions
Overshooting/Undershooting The motor is overheated (burnout)
Category
Adjustment
Installation
Cause
Gains are poorly adjusted.
Load inertia is high.
The equipment (machine) has play and
slip.
Ambient temperature and environment
The cooling fan stops. The air intake of
the fan is dirty.
Mismatch between the driver and motor
The motor bearing is defective.
The electromagnetic brake keeps on
running (failure to release the brake).
The motor is defective (due to oil,
water, etc.)
With the dynamic brake activated, the
motor is rotated by external force.
Action
Check gains using the waveform graphic function of
PANATERM
®
. Correctly adjust gains. Refer to Section on
Adjustment.
Check gains using the waveform graphic function of
PANATERM
®
. Increase capacity of the motor and driver and
decrease inertia ratio. Use reduction gears.
Modify coupling with the equipment (machine).
If the ambient temperature exceeds a specified value, install the
cooling fan to reduce the temperature.
Inspect the cooling fans of the equipment and the driver. As the
latter needs to be replaced, ask for repair.
Check the nameplates of the driver and motor. Referring to the
instruction manuals or catalogs, select a correct combination of
them.
Power off, turn the shaft of the motor independently, and check
if there is any rumbling sound. If so, replace the motor. Ask for
repair.
Check voltage of the brake terminal. Apply power (DC24V) to
the power supply and release the brake.
Avoid high temperature/humidity, oil, dust, and iron powders.
Check the operating pattern, use condition, and working
condition, and avoid this kind of operation.
Parameter returns to the last value
When using PANATERM
®
, the message “communication port or driver cannot be detected” appears
The speed (movement) is large or small
Rotation speed does not increase to the set speed
Category
Adjustment
Cause
The position loop gain is low.
The dividing/multiplier are not
appropriate.
Action
Adjust the value of the position loop gain Pr10 to approximately
100.
Correct the values of the numerator of 1st command pulse ratio
Pr46, multiplier of numerator of command pulse ratio 4A, and
denominator of command pulse ratio 4B. Refer to parameter
settings of each mode.
Category
Parameter
Cause
A parameter value has not been written
into EEPROM prior to power-off of the
driver.
Action
Refer to Writing to EEPROM of “Structure of Each Mode” on
Page 50 of Preparation edition.
Category
Wiring
Cause
The connector CN X6 is not connected
to the personal computer through the
communications cable (RS232C).
Action
Connect the communications cable (RS232C) to the connector
CN X6. Check that the communications cable is disconnected.