Troubleshooting, Positioning accuracy is poor – Panasonic MINAS E-series User Manual
Page 152
152
Troubleshooting
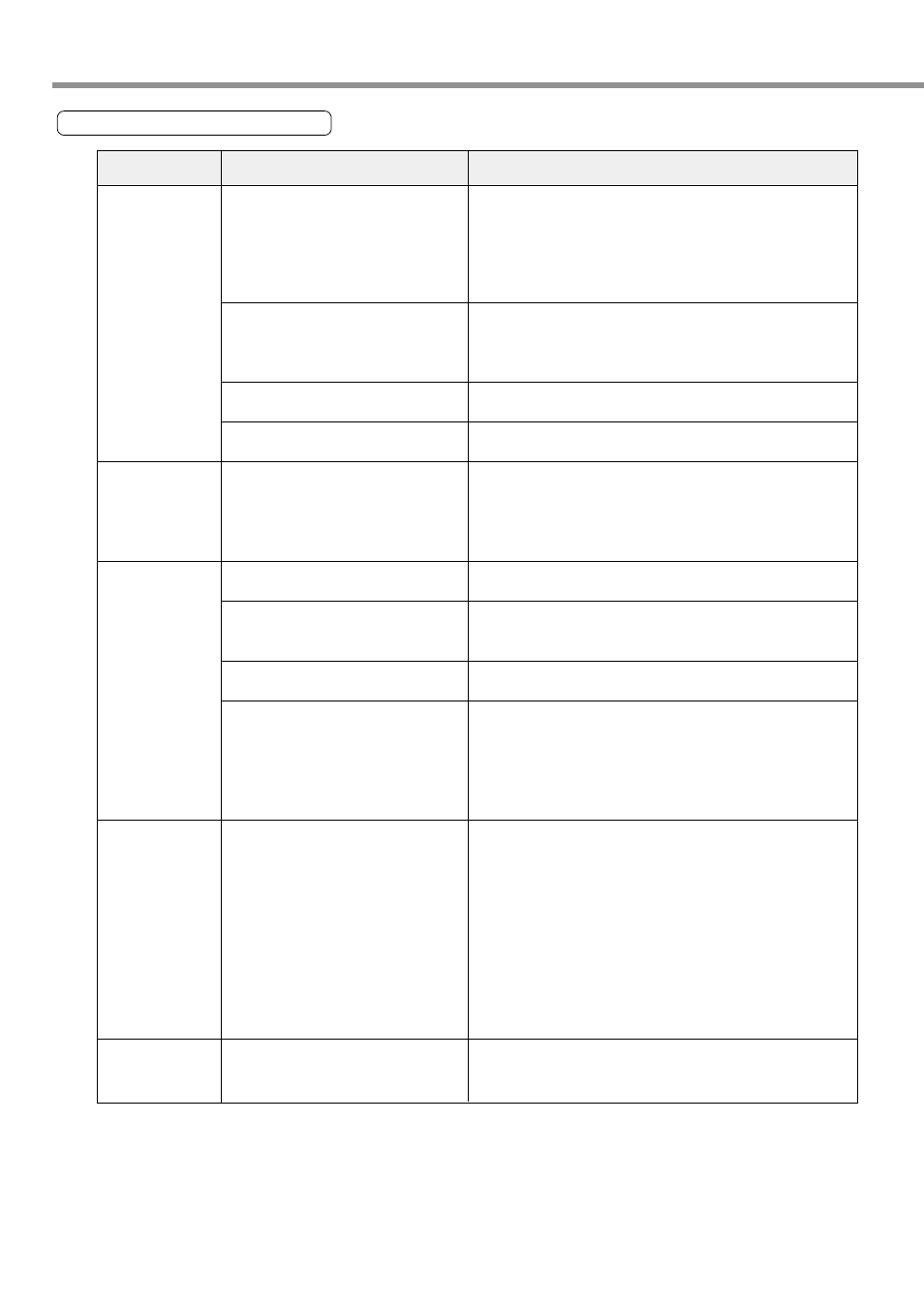
Positioning Accuracy is poor
Category
System
Adjustment
Parameter
Wiring
Installation
Cause
The position commands (amount of
command pulse) are not correct.
Reading of the positioning completion
signal occurs at the edge.
The shape and width of the command
pulses do not meet the requirements.
The deviation counter clear input CL
(CN X5 pin 4) is superposed with noise.
The position loop gain is small.
The setting of positioning completion
range is too high.
The command pulse frequency exceeds
500 kpps.
The incorrect dividing/multiplier ratio is
set.
The velocity loop gain is in proportional
control action under suspension.
The following signal inputs of the
connector CN X5 are chattering.
(1) Servo-ON signals
(2) Deviation counter clear input signals
Load inertia is high.
Action
Count the number of feedback pulses either by repeatedly
reciprocating for a fixed distance and using the monitoring
function of PANATERM
®
, or by using the monitor mode of
feedback pulse of the console. If the count does not return to
the same value, adjust the controller. Take action to reduce
noise on the command pulse.
By using the waveform graphic function of PANATERM
®
,
monitor a deviation when positioning completion signal is
generated. Read the signal from the controller at a midpoint of
the time span, and not at the edge.
If the command pulses are deformed or narrowed, adjust the
pulse generating circuit. Review the action against noise.
Not only take action against noise from external DC power
supply, but also do not wire any unused signal line.
Check amount of position deviation either by using the
monitoring function of PANATERM
®
or in the monitor mode of
the console.
Increase the value of Pr10 so as not to cause oscillation, and
check it.
Decrease the value of the In-position range Pr60 so that the
completion signal will not cause chattering.
Lower the command pulse frequency. Change the dividing/
multiplier ratio of the numerator of 1st/2nd command pulse ratio
Pr46 to Pr47.
Check whether repeatability is the same.
•
Set the velocity loop integration time constant Pr12 and
Pr1A below 999.
•
Modify wiring and connection so that the second gain action
set-up Pr30 is 1, and connection between the gain switching
input connector CN X5 pins 5 and 13 is turned OFF. Check
the controller.
(1) Using the I/O status display function, check wiring and
connection between the connector CN X5 pins 2 and 13.
Modify the wiring and connection so that Servo-ON signal
successfully turns ON. Check the controller.
(2) Using the I/O status display function, check wiring and
connection between the connector CN X5 pins 4 and 13.
Modify the wiring and connection so that the deviation
counter clear input successfully turns ON. Check the
controller.
Check overshot in halt condition, by using the waveform graphic
function of PANATERM
®
. Even when it is not corrected after
adjusting gains, increase capacity of the motor and driver.