Anti-vibration control, Manual gain tuning (application), Outline – Panasonic MINAS E-series User Manual
Page 142: Scope, Cautions, Usage
142
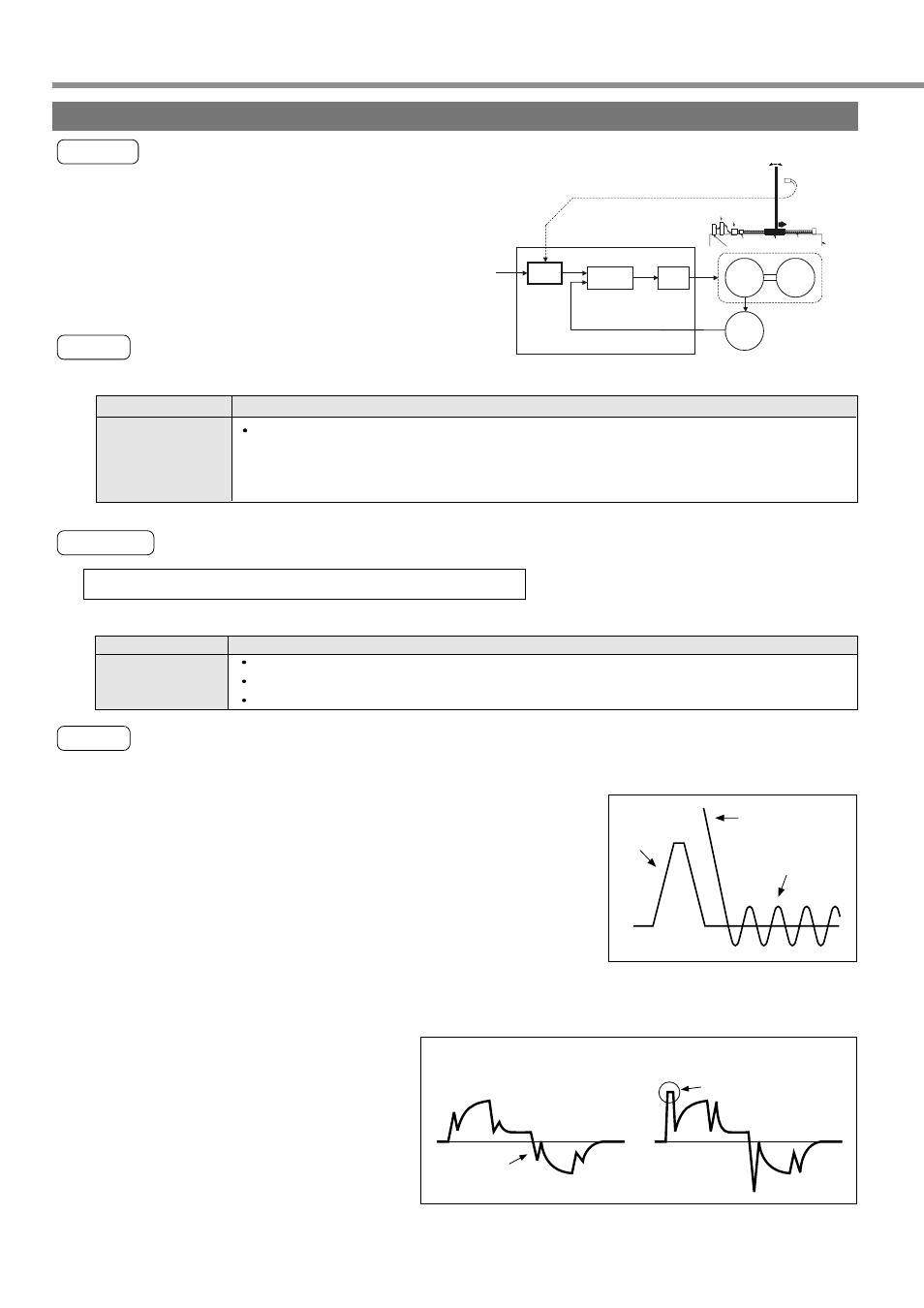
Motor
Encoder
Servo driver
Motor position
Load
Motor
Coupling
Ball
screw
Movable
body
Movement
Driver
Sequencer
Set vibration frequency at a leading end
Position
command
Vibration
damping
filter
The leading end
vibrates
Vibration observed by a
displacement sensor
Position Velocity
Control
Torque
command
Current
control
Motor
current
Machine
pedestal
Anti-Vibration Control
Outline
When the leading end of a device vibrates, the function
removes vibration frequency component from a command
and reduces vibration.
Scope
This function cannot apply unless the following conditions are met:
Cautions
Change the parameter setting, after the operation stops.
The motor may not function normally or take effect under the following conditions:
Usage
(1) Setting vibration damping frequency (Pr2B)
Measure vibration frequency at a leading end of a device. If you can
directly measure vibration at leading end by means of a laser
displacement gauge, etc., read vibration frequency [Hz] from the
measured waveform and enter it into vibration damping frequency
(Pr2B).
In addition, if you do not have a measuring instrument, read
frequency [Hz] of residual vibration from position deviation waveform
by using the waveform graphic function of our setup support
software “PANATERM
®
”, as shown in the right figure, and set the vibtation
damping frequency. Setting 0 to 99 will be disabled.
(2) Setting vibration damping filter (Pr2C)
First set it to 0.
You can shorten the stabilization time by
setting a higher value. However, torque
ripple increases at a command change point,
as shown in the right figure. Thus, under
actual use conditions, set it so that no torque
saturation will occur. Occurrence of torque
saturation will diminish vibration suppression
effect.
Control mode
Conditions under which anti-vibration control works
It shall be position control.
Pr02=0: In high speed response positioning control, real time auto tuning and first notch filter are
disabled.
Pr02=2: High function positioning control
Load
Conditions that hinder anti-vibration control
When vibration is energized by a factor (such as external force) other than command
When the ratio of resonance frequency and antiresonance frequency is large
When vibration frequency is high (100 [Hz] or higher)
Command
speed
Position deviation
Calculate vibration
frequency
Torque command
Torque saturation
Pr2C is high
Pr2C is appropriate
Manual Gain Tuning (Application)