Parameter setting, Parameter for selection of functions – Panasonic MINAS E-series User Manual
Page 88
88
Setting
0
1
[2]
Control Mode
High velocity response positioning control (pulse)
Internal velocity control
High function positioning control (pulse)
Parameter for Selection of Functions
Standard Default Setup: [ ]
PrNo.
Parameter Name
Function/Content
In communications with a host such as a personal computer that uses RS232C
with multiple axes, you should identify to which axis the host is accessing. With
this parameter, you can see an axis name by number.
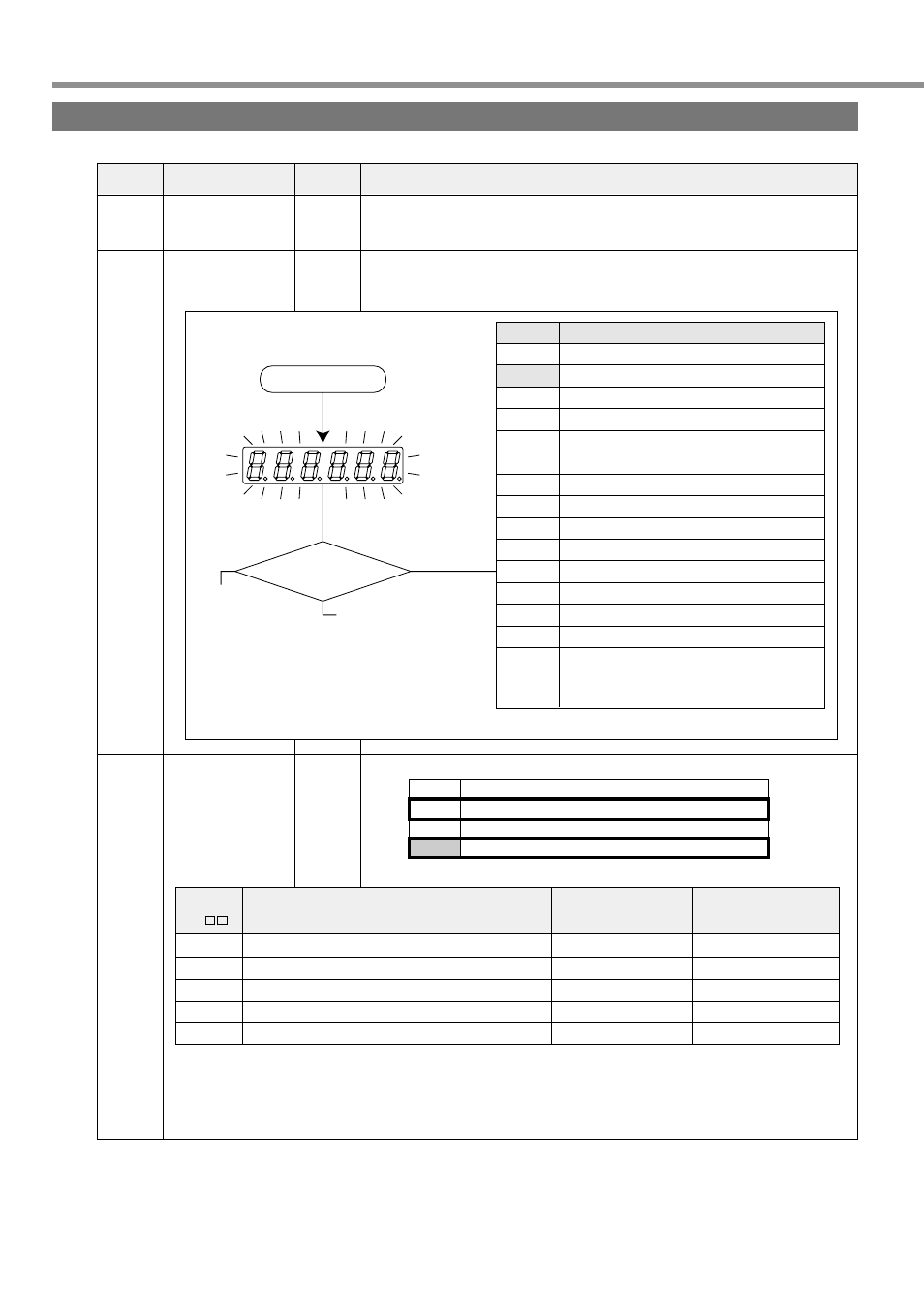
In the initial state after power-on, you can select any type of data displayed by 7
segment LEDs on the console.
The parameter sets a control mode to be used.
00
01
02
Axis address
LED for console,
initial condition
display
Control mode set
up
0 - 15
[1]
0 - 15
0 - 2
Parameter Setting
Range of
Settings
Turn on the power
Setting of Pr01
This blinks during initialize
operation (about 2 seconds).
Settings
Content
0
[1]
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Position deviation
Motor rotation speed
Torque output
Control mode
Input/output signal condition
Error factor, history
To be used by the manufacturer
Warning
Regenerative Load Ratio
Overload factor
Inertia ratio
Feedback pulse total
Command pulse total
Not available
Not available
Checking if there is motor automatic
recognition function
For details of displays, refer to “Monitoring Mode” on Page 51 of Preparation edition.
In high velocity response positioning control, simultaneous use of the 1st notch frequency, vibration damping
frequency, real time auto tuning mode setting is not allowed. A parameter entered earlier takes precedence.
(Example) If real time auto tuning has been set, the first notch frequency will be forcibly set to 1500
(invalidated) on the driver side, even when you enter it.
Control mode set-up
1st notch frequency
Damping frequency
Real time auto tuning mode set up
Adaptive filter frequency
02
1D
2B
21
2F
2
Validated
Validated
Validated
Validated
0
Conditional
Conditional
Conditional
Invalidated
Parameter No.
(Pr )
High velocity response
positioning control
High function
positioning control
Parameter Name