S6: error detection – Yaskawa CIMR-LU Drives User Manual
Page 203
B Parameter Table
YASKAWA ELECTRIC TOEP C710616 38F YASKAWA AC Drive L1000A Quick Start Guide
203
Par
ame
te
r Ta
ble
B
■
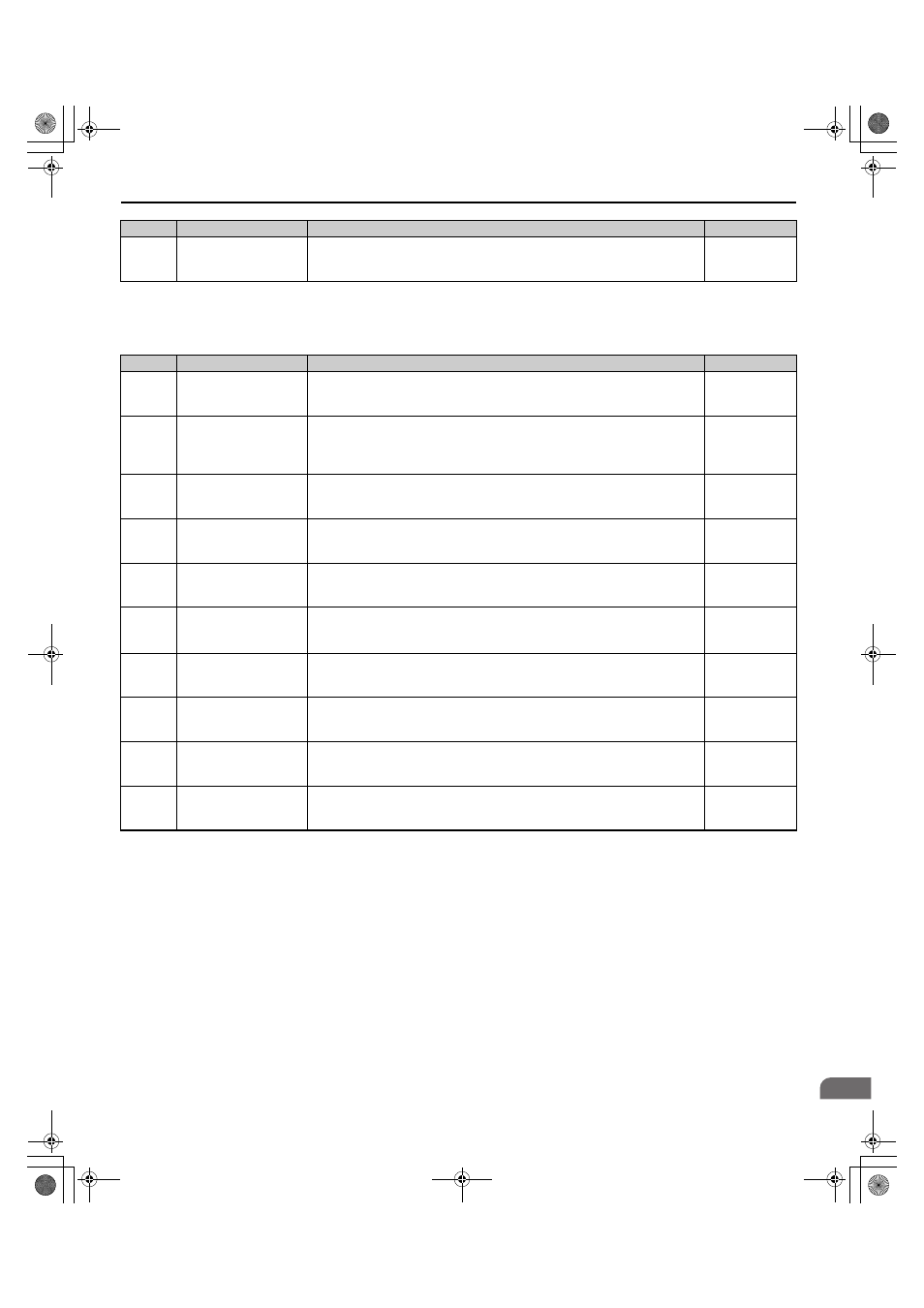
S6: Error Detection
S5-13
Direct Landing Minimum
Speed Level
Sets the speed level for the start of Direct Landing.
Direct Landing is essentially disabled if the starting speed for Direct Landing is less
than the maximum output speed multiplied by this parameter (E1-04
× S5-13).
Default: 20%
Min: 0%
Max: 100%
<36> When the length units are set for inches (o1-12 = 1), the setting range becomes 0.00 to 650.00 inches.
<37> When the length units are set for inches (o1-12 = 1), the setting range becomes 0.00 to 393.00 inches.
No.
Name
Description
Setting
S6-01
<7> Default setting value is determined by the digital operator display unit selection (o1-03). The default is normally 1.5 m/s2, but when o1-03 = 6,
the default becomes 5.0 ft/s
2
(Setting Range: 0.0 to 50.0 ft/s
2
).
<44> Available in drive software versions PRG: 7017 or later.
Motor Contactor Response
Error (SE1) Detection/
Reset Selection
0: Detect during stop, SE1 must be manually reset
1: Detect during stop, SE1 can be automatically reset
2: No SE1 detection
Default: 0
Min: 0
Max: 2
S6-02
Starting Current Error
(SE2) Detection Delay
Time
Sets a delay time for detecting SE2.
Default: 200 ms
Min: 0.00 ms
Max:
[S1-04]-[S1-06]
S6-03
SE2 Detect Current Level
Sets the level of current applied to the motor when the Brake Control command is
activated, as a percentage of the Motor No-load Current (E2-03).
Default: 25%
Min: 0%
Max: 100%
S6-04
Output Current Error (SE3)
Detection Delay Time
Sets a delay time for detecting SE3.
Default: 200 ms
Min: 0 ms
Max: 5000 ms
S6-05
Brake Response Error
(SE4) Detection Time
Sets a delay time for detecting SE4.
Default: 500 ms
Min: 0 ms
Max: 10000 ms
S6-10
Overacceleration Detection
Level
If the elevator car accelerates at an abnormal rate, the drive triggers an overspeed fault
(dv6) and has the motor coast to stop. Parameter S6-10 determines the acceleration
rate that triggers a fault.
Min: 0.0 m/s
2
Max: 20.0 m/s
S6-11
Overacceleration Detection
Time
Sets a primary delay for detecting overacceleration.
Default: 50 ms
Min: 0 ms
Max: 5000 ms
S6-12
Overacceleration Detection
Selection
0: Always enabled
1: During run only
Default: 0
Min: 0
Max: 1
S6-15
Speed Reference Loss
Detection
Enabled or disables detection for speed reference missing (FrL).
0: Disabled
1: Enabled
Default: 1
Min: 0
Max: 1
S6-16
Restart after Baseblock
Selection
0: No restart after Baseblock/Safe Torque-Off
1: Restart after Baseblock/Safe Torque-Off
Default: 0
Min: 0
Max: 1
No.
Name
Description
Setting
TOEP_C710616_38F_5_0.book 203 ページ 2013年12月4日 水曜日 午前9時56分