N8: pm motor control tuning, N9: current detection adjustments – Yaskawa CIMR-LU Drives User Manual
Page 195
B Parameter Table
YASKAWA ELECTRIC TOEP C710616 38F YASKAWA AC Drive L1000A Quick Start Guide
195
Par
ame
te
r Ta
ble
B
■
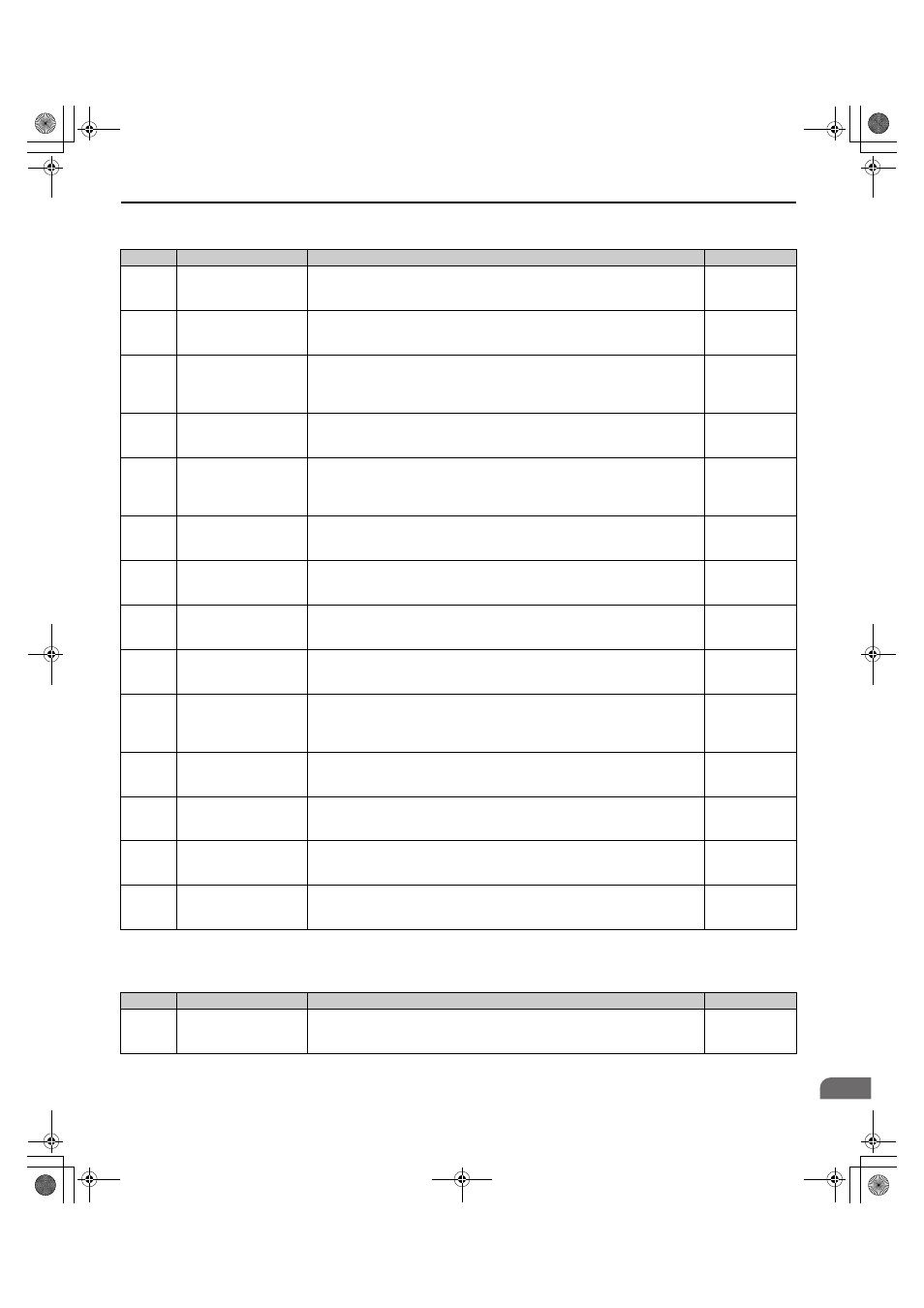
n8: PM Motor Control Tuning
■
n9: Current Detection Adjustments
No.
Name
Description
Setting
n8-01
<9> Values shown here are for 200 V class drives. Double the value when using a 400 V class drive. Multiply value by 2.875 for 600 V class drives.
Initial Polarity Estimation
Current
Sets the current used for initial rotor position estimation as a percentage of the motor
rated current (E5-03). If the motor nameplate lists an “Si” value, that value should be
entered here.
Default: 50%
Min: 0%
Max: 100%
n8-02
Pole Attraction Current
Sets the current during initial polar attraction as a percentage of the motor rated
current. Enter a high value when attempting to increase starting torque.
Default: 80%
Min: 0%
Max: 150%
n8-29
q-Axis Current Control
Gain during Normal
Operation
Sets the q axis proportional gain for the normal control range.
Default:
1000 rad/s
Min: 0 rad/s
Max: 2000 rad/s
n8-30
q-Axis Current Control
Integral Time during
Normal Operation
Sets the q axis integral time for the normal control range.
Default: 10.0 ms
Min: 0.0 ms
Max: 100.0 ms
n8-32
d-Axis Current Control
Gain during Normal
Operation
Sets the d axis proportional gain for the normal control range.
Default:
1000 rad/s
Min: 0 rad/s
Max: 2000 rad/s
n8-33
d-Axis Current Control
Integral Time during
Normal Operation
Sets the d axis integral time for the normal control range.
Default: 10.0 ms
Min: 0.0 ms
Max: 100.0 ms
n8-35
Initial Rotor Position
Detection Selection
1: High frequency injection
2: Pulse injection
Default: 1
Min: 1
Max: 2
n8-36
High Frequency Injection
Level
Sets the frequency in Hz for the superimposed signal used for superimposed
harmonics.
Default: 500 Hz
Min: 25 Hz
Max: 1000 Hz
n8-37
High Frequency Injection
Amplitude
Sets the amplitude for superimposed harmonics according to the voltage class of the
motor. Adjust this value when there is too much or too little current as a result of the
settings assigned to motor parameters.
Default: 20.0%
Min: 0.0%
Max: 99.9%
n8-62
Output Voltage Limit
Prevents output voltage saturation. Should be set just below the voltage provided by
the input power supply.
Default:
200.0 V
Min: 0.0 V
Max: 230.0 V
n8-81
High Frequency Injection
during Rescue Operation
Sets the frequency used for Polar Detection Method 1 during Rescue Operation.
Default: 90 Hz
Min: 25 Hz
Max: 1000 Hz
n8-82
High Frequency Injection
Amplitude during Rescue
Operation
Sets the amplitude for High Frequency Injection during Rescue Operation as a
percentage of the voltage (200 V or 400 V).
Default: 15.0%
Min: 0.1%
Max: 99.9%
n8-84
Polarity Detection Current
Sets the current level (E5-03) as a percentage for detecting polarity during Initial
Polarity Estimation.
Default: 100%
Min: 0%
Max: 150%
n8-86
Magnet Pole Search Error
Detection Selection
0: Disabled
1: Enabled
Default: 0
Min: 0
Max: 1
No.
Name
Description
Setting
n9-60
<4> Default setting is determined by the drive model (o2-04).
A/D Conversion Start
Delay
Sets a delay time for starting the current signal A/D conversion. This value seldom
needs to be changed.
Min: 0.0
μs
Max: 40.0
μs
TOEP_C710616_38F_5_0.book 195 ページ 2013年12月4日 水曜日 午前9時56分