4 start-up programming & operation – Yaskawa CIMR-LU Drives User Manual
Page 126
4 Start-Up Programming & Operation
126
YASKAWA ELECTRIC TOEP C710616 38F YASKAWA AC Drive L1000A Quick Start Guide
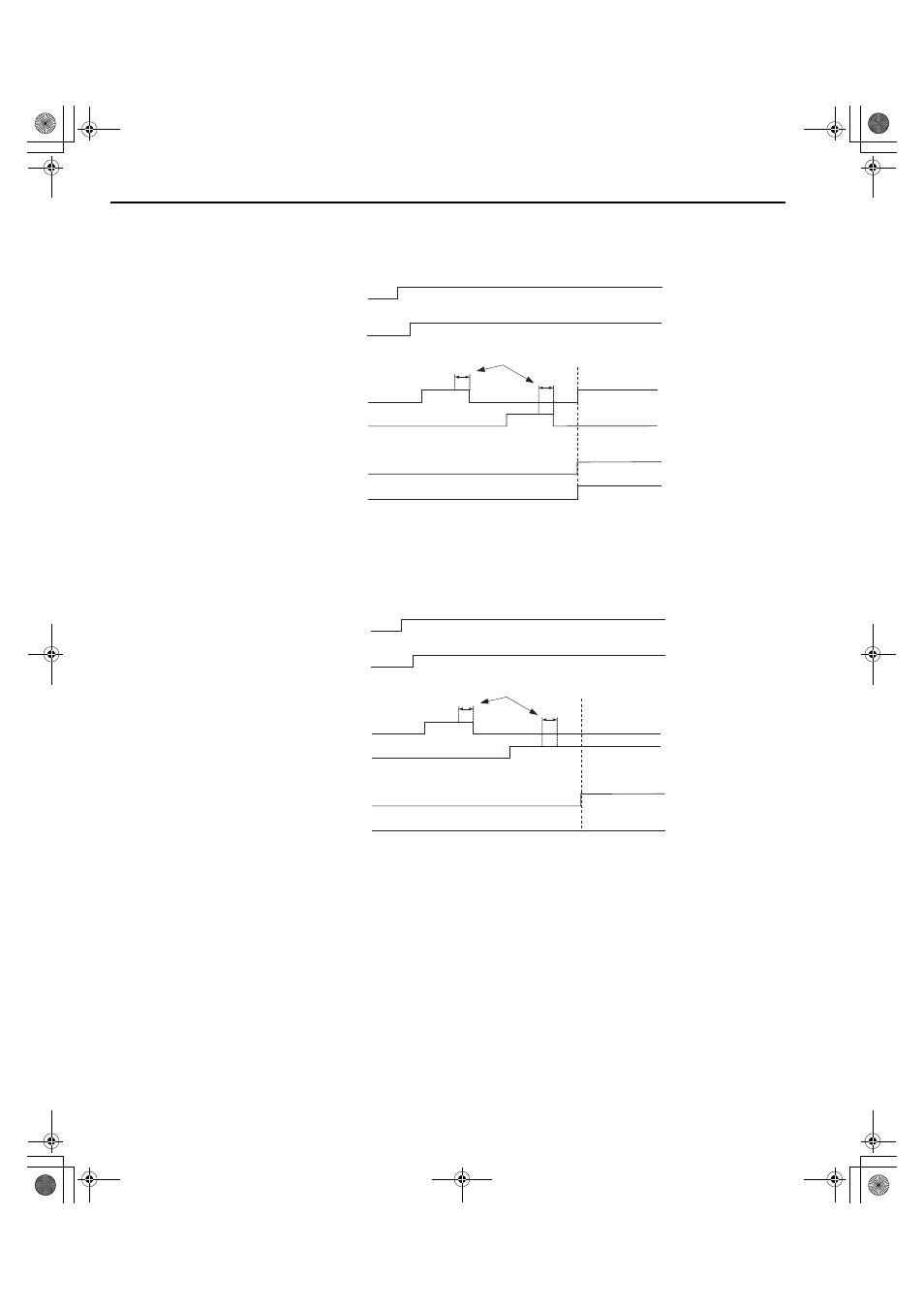
• When the lightest load direction is up, the drive stops after Light Load Direction Search and then accelerates upwards to
the Rescue Operation speed set in parameter S4-15. The output terminals set for “Light Load Direction” (H2-
= 54)
and “Light Load Direction detection status”(H2-
= 55) will close.
Figure 70
Figure 77 Light Load Direction Detection (Up)
• When the lightest direction is down, then after Light Load Direction Detection is finished the drive immediately
accelerates to the Rescue Operation speed set in S4-15 without stopping. An output terminal set for “Light load
direction” (H2-
= 54) will stay open, and an output terminal set for “Light Load Direction detection status”(H2-
= 55) will close.
Figure 71
Figure 78 Light Load Direction Detection (Down)
H1-
غغ = 55
(Rescue Operation)
Up
Off (open)
Off (open)
Up
Down
Speed agree torque calculations
Elevator moves in the
direction of the light load
Up/Down command
Up command (internal)
Down command (internal)
On (closed)
On (closed)
㧔Light Load Direction Search status㧕
H2-
= 55
㧔Light load direction㧕
H2-
= 54
Off (open)
Off (open)
On (closed)
On (closed)
H1-
غغ = 55
(Rescue Operation)
Up
Off (open)
Off (open)
Down
Speed agree torque calculations
Elevator moves in the
direction of the light load
Up/Down command
Up command (internal)
Down command (internal)
On (closed)
On (closed)
㧔Light Load Direction Search status㧕
H2-
= 55
㧔Light load direction㧕
H2-
= 54
Off (open)
Off (open)
On (closed)
TOEP_C710616_38F_5_0.book 126 ページ 2013年12月4日 水曜日 午前9時56分