4 start-up programming & operation – Yaskawa CIMR-LU Drives User Manual
Page 104
4 Start-Up Programming & Operation
104
YASKAWA ELECTRIC TOEP C710616 38F YASKAWA AC Drive L1000A Quick Start Guide
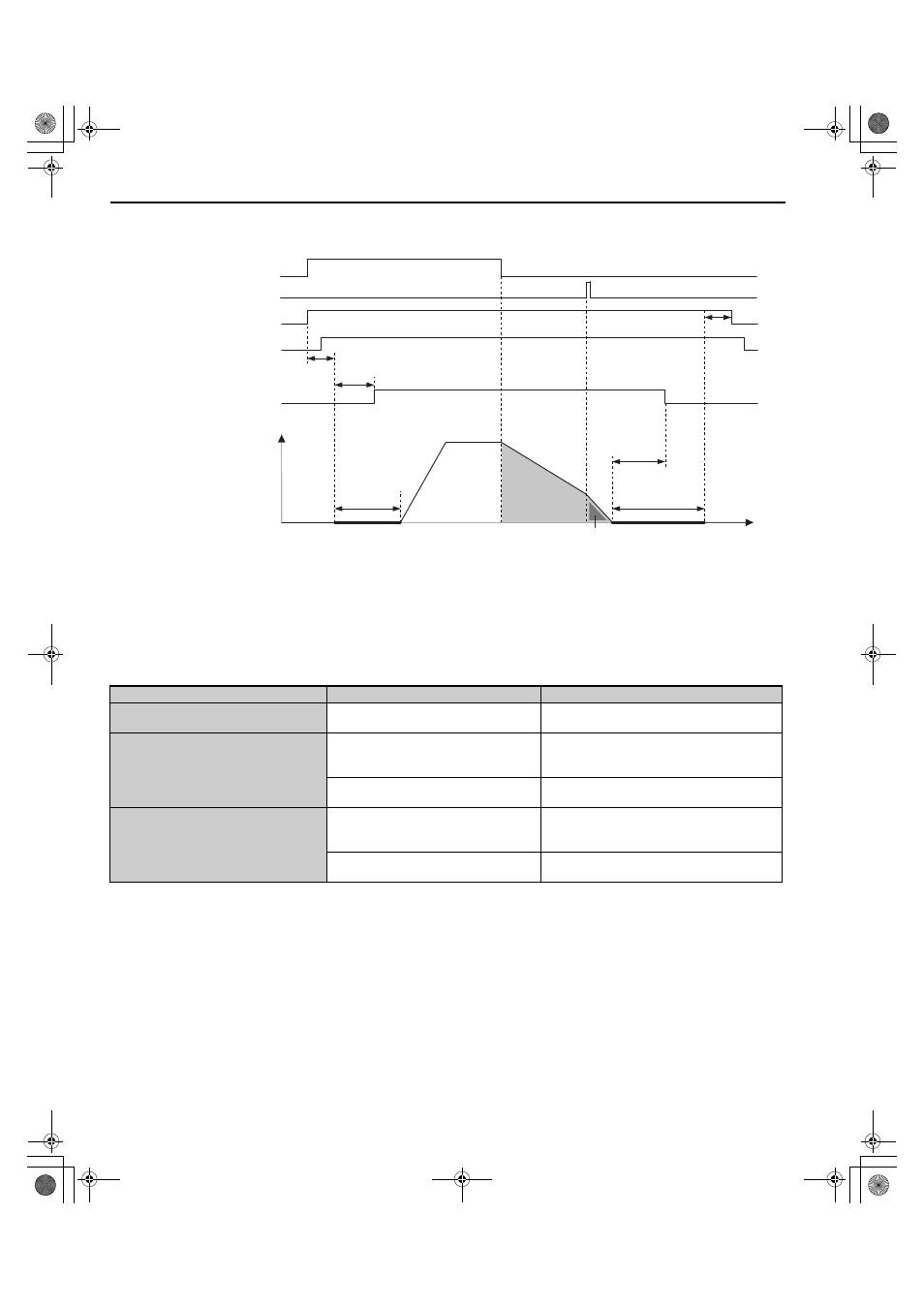
Figure 51 Direct Landing Operation Example
Leveling Distance Control
Leveling Distance Control (S5-10 = 2) uses the leveling speed reference for the remaining distance to arrive at the
designated floor. Leveling Distance Control is activated when the conditions listed in
are met.
Table 32 Leveling Distance Control Operation
<1> Area S1 is the deceleration distance (S5-11) from the start of deceleration to stop. Area S2 is the stopping distance (S5-12) from the point
at which the stopping distance compensation signal is entered to when the car arrives at the designated floor.
Speed Priority Selection
Multi-Function Input Terminal Settings Leveling Distance Control Start Conditions
Multi-step speed sequence
(d1-18 = 0, 3)
–
The Up/Down command is not active or the speed
reference is 0.
High speed reference has priority
(d1-18 = 1)
Leveling speed reference is selected
(H1-
= 53).
The Up/Down command is not active, or all input
terminals set for
H1-
= 50 to 53 are open.
Leveling speed reference is not selected
(H1-
≠ 53).
Up/Down command is not active.
Multi-step speed sequence
(d1-18 = 2)
Rated speed reference is selected
(H1-
= 50).
The Up/Down command is not active, or all input
terminals set for
H1-
= 50 to 53 are open.
Rated speed reference is not selected
(H1-
≠ 50).
Up/Down command is not active.
Operation
Speed
Time
ON
OFF
OFF
Run Command Delay Time (S1-10)
Brake Release Delay Time
(S1-06)
Brake Close
Delay Time
Output Contactor Open
Delay Time (S1-11)
Zero Speed
at Stop
(S1-07)
Zero Speed
at Start
Run Command
(Forward [Up] / Reverse [Down])
H1-
= 5C
(Stop Distance Correction)
H2-
= 51
(
Output Contactor Control
)
H1-
= 56
(
Motor Contactor Feedback
)
H2-
= 50 (Brake Control
)
ON
ON
ON
OFF
S1
S2
<1>
<1>
TOEP_C710616_38F_5_0.book 104 ページ 2013年12月4日 水曜日 午前9時56分