P4-10: auto mode operator run power down storage, P4-12: thrust bearing frequency, P4-17: utility start delay – Yaskawa iQpump1000 AC Drive Quick Start User Manual
Page 233: P5-02: hand reference 1
n
P4-10: AUTO Mode Operator Run Power Down Storage
Selects drive response to power loss with regards to the Run command. When running in AUTO Mode and using a Run
command from the keypad (b1-02 = 0), P4-10 determines whether the drive will automatically start running when power is
reapplied. The factory setting of this parameter requires pressing the AUTO key to start the drive after power loss.
WARNING! Sudden Movement Hazard. If the drive is running at power loss, it will automatically initiate an internal Run command upon
power-up if P4-10 = 1 (Enabled) and could result in death or serious injury from moving equipment.
No.
Parameter Name
Setting Range
Default
P4-10
AUTO Mode Operator Run Power Down Storage
0, 1
0
Setting 0: Disabled
Setting 1: Enabled
n
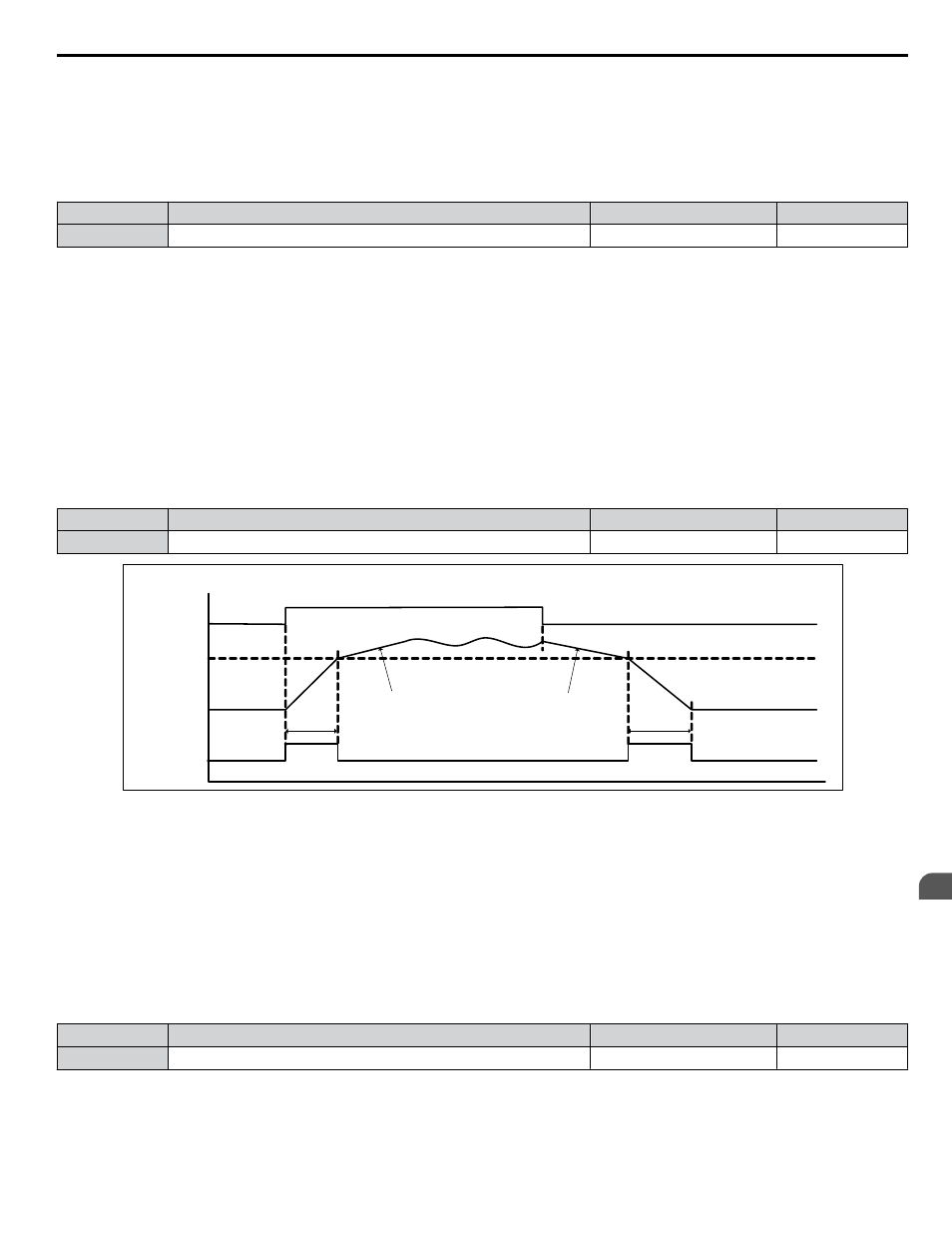
P4-12: Thrust Bearing Frequency
Sets the frequency used by the drive when determining which acceleration and deceleration time to use. The Thrust Bearing
function is used for applications using submersible motors. The function provides an alternate acceleration time (P4-11) and
deceleration time (P4-13) for protecting the pump bearings.
At start, the drive will use the P4-11 acceleration time until the P4-12 frequency is reached, at which time it will use the active
C1-oo acceleration and deceleration times. At stop, if the output frequency is above the P4-12 setting, the active C1-oo
deceleration time will be used until the P4-12 setting is reached at which time it will use the P4-13 time setting for the rest of
deceleration.
If P4-12 is set greater than P1-06 (minimum Pump Speed), P4-12 will become the frequency lower limit. The drive PID control
must be disabled (b5-01 = 0) for this function to work.
No.
Parameter Name
Setting Range
Default
P4-12
Thrust Bearing Frequency
0.0 to E1-04
30.0 Hz
R un
C omm an d
T hrust B ea ring
R am p T o Stop (b1-03 = 0)
“T hrust Active”
M essage &
D igital Ou tpu t
(H 2-0x = A9)
Ou tpu t
F requen cy
P4-11
P4-13
P4-12 – T hrust F requen cy
C 1-01
(or selected)
Accel R ate
C 1-02
(or selected)
D ecel R ate
Figure 4.51 Thrust Bearing
n
P4-17: Utility Start Delay
Sets the delay time after power up until the drive will recognize a Run command present within one second of power up or
when the Run command is jumpered on the terminal strip.
This is useful in preventing a peak power surge when multiple drives power up and begin accelerating simultaneously. This
function works when the drives all have different P4-17 settings to spread out the power draw during acceleration.
If the Run command is removed and re-applied during the P4-17 time, the drive will cancel the utility start delay and
immediately begin running.
The Utility Start Delay is applied when the drive is auto-restarting after an Undervoltage (Uv) or an Overvoltage (ov) condition.
No.
Parameter Name
Setting Range
Default
P4-17
Utility Start Delay
0.0 to 1000.0 min
0.2 min
n
P5-02: HAND Reference 1
Sets the frequency reference of HAND mode. When the drive is stopped, pressing the HAND key will start the drive and the
drive will accelerate to the P5-02 setting.
4.6 Basic iQpump Setup and Application Preset Parameters
YASKAWA TOEP YAIP1W 01B YASKAWA AC Drive - iQpump1000 Quick Start Guide
233
4
Start-Up Programming & Operation